














Chi-Hang Kwan
Các tác giả
Guillaume Painchaud
Benoit Lepage
Bài viết được trình bày lần đầu tại Hội nghị chuyên đề nghiên cứu ASNT 2019.
TỔNG QUAN
Trong bài báo này, chúng tôi giới thiệu một mô hình phân tích mới được phát triển để dự đoán bản đồ độ nhạy phản hồi cho TFM cho cả khuyết tật không định hướng (dạng khối) và định hướng (dạng mặt). Đối với các đường truyền âm phức tạp liên quan đến nhiều mặt phản xạ và chuyển đổi dạng sóng, thông tin có được từ bản đồ độ nhạy (AIM) cho phép người kiểm tra tinh chỉnh kế hoạch quét để tối đa hóa tỷ lệ SNR của hình ảnh TFM và tăng xác suất phát hiện khuyết tật. Độ chính xác của mô hình mới này đã được kiểm tra và xác nhận bằng các thí nghiệm sử dụng các khối mẫu có chứa các lỗ khoan cạnh và lỗ đáy bằng. Kết quả từ các thí nghiệm xác nhận sự tương ứng giữa các bản đồ biên độ TFM theo kinh nghiệm và AIM lý thuyết. Kết quả cũng chỉ ra rằng mô hình có thể được sử dụng để hướng dẫn lựa chọn chế độ kiểm tra TFM tối ưu cho các ứng dụng như kiểm tra mối hàn.
GIỚI THIỆU
Phương pháp dựng hình ảnh siêu âm lấy nét toàn phần (TFM) là một kỹ thuật hình thành hình ảnh hội tụ tổng hợp đang phát triển rất nhanh trong ngành công nghiệp NDT trong thập kỷ qua [1]. Bằng cách áp dụng độ trễ truyền và nhận thích hợp cho dữ liệu quét A được thu thập từ bộ dữ liệu thu thập ma trận đầy đủ (FMC), TFM có thể hội tụ vào mọi vị trí trong vùng kiểm tra. Vì mọi điểm đều được hội tụ, TFM có thể cung cấp độ phân giải tốt hơn so với các kỹ thuật kiểm tra siêu âm mảng pha thông thường. Ngoài ra, bằng cách tính toán và áp dụng thời gian truyền theo nhiều chế độ khác nhau, TFM có thể cung cấp thêm nhiều thông tin về mẫu đang được kiểm tra [2].
Mặc dù có những ưu điểm được liệt kê ở trên, TFM cũng chịu những giới hạn vật lý của sóng siêu âm. Một khu vực kiểm tra có thể có độ nhạy kém do ảnh hưởng của tương tác với mặt phân cách, hạn chế hình thành chùm tia và gây suy giảm đường truyền. Do TFM là một phương pháp mới, tiêu chuẩn kiểm tra còn thiếu và độ phức tạp của hình ảnh TFM, người sử dụng thường không nắm rõ về các giới hạn vật lý của TFM và do đó, không thể xác định kế hoạch quét tối ưu để tối đa hóa SNR và xác suất phát hiện khuyết tật. Do đó, cần phải có công cụ ước tính độ nhạy cho kế hoạch quét kiểm tra TFM.
VÙNG ẢNH HƯỞNG CỦA SÓNG ÂM
Bản đồ ảnh hưởng sóng âm (AIM) là bản đồ biên độ độ nhạy siêu âm lý thuyết cho kế hoạch quét kiểm tra TFM. Nói chung, AIM của khuyết tật định hướng và không hướng sẽ khác nhau. Các khuyết tật không định hướng bao gồm ngậm xỉ và rỗ khí mối hàn, trong khi các khuyết tật định hướng bao gồm các vị trí không ngấu hoàn toàn trong các mối hàn và các vết nứt. Đáp ứng tín hiệu phản xạ từ khuyết tật có hướng là một tham số quan trọng thường bị bỏ qua trong khi mô hình hóa các hệ thống đầu dò mảng pha.
Để tính toán AIM, Olympus đã phát triển một mô hình âm thanh kết hợp giữa phân tích và dựng hình chùm âm, tính toán đáp ứng âm áp của chế độ kiểm tra xung-vọng, và siêu âm song song (Self-tandem). Mô hình âm thanh này có tính đến các ảnh hưởng của hệ số truyền qua và phản xạ, hình dáng hình học của sóng âm và suy giảm vật liệu. Ngoài ra, trong mô hình của chúng tôi, chúng tôi cũng đã sử dụng tích phân Rayleigh – Sommerfeld [3] để mô hình hóa phản ứng tán xạ trường xa cho lỗ đáy phẳng (FBH). Phản ứng tán xạ FBH được sử dụng để mô phỏng các khuyết tật định hướng.
XÁC NHẬN THÍ NGHIỆM
Để kiểm tra độ chính xác của mô hình âm thanh, chúng tôi đã tiến hành các thí nghiệm xác nhận để so sánh các bản đồ biên độ TFM thu được bằng thực nghiệm với một bản đồ AIM TFM được tính toán theo lý thuyết. Kết quả thu được từ hai thí nghiệm được trình bày trong phần sau. Thí nghiệm xác nhận đầu tiên được thực hiện trên một mẫu thử nghiệm có chứa các lỗ khoan cạnh đường kính nhỏ (SDH), mô phỏng phản ứng tán xạ của các khuyết tật không định hướng. Thí nghiệm xác nhận thứ hai được tiến hành trên một khối mẫu thử nghiệm có chứa FBH, mô phỏng phản ứng tán xạ của khuyết tật định hướng.
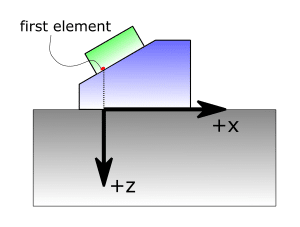
Đối với các kết quả được trình bày trong bài viết này, trục x được xác định dương ở bên phải của phần tử đầu dò đầu tiên và trục z được xác định dương dưới bề mặt của mẫu thử. Một sơ đồ nguyên lý của hệ tọa độ này được hiển thị trong Hình 1.
Xác nhận lỗ khoan cạnh
Thí nghiệm xác nhận SDH được thực hiện trên mẫu thử nghiệm NAVSHIPS bằng thép 1018 chứa sáu SDH đường kính 1,2 mm (0,05 in) ở độ sâu từ 6,25 mm (0,25 in.) đến 37,5 mm (1,5 in.). Với bước tăng 6,25 mm. Bằng cách di chuyển đầu dò trên khối thử nghiệm, có thể kiểm tra SDH ở độ sâu từ 6,25 mm (0,25 in.) đến 68,75 mm (2,7 in.). Đối với thử nghiệm này, chúng tôi đã sử dụng đầu dò 32 phần tử 5L32-A31 với tần số trung tâm là 5 MHz và khoảng cách phần tử là 0,6 mm. Đầu dò được ghép nối với nêm SA31-N55S-IHC. Sơ đồ của thiết lập thử nghiệm được mô tả trong Hình 2.
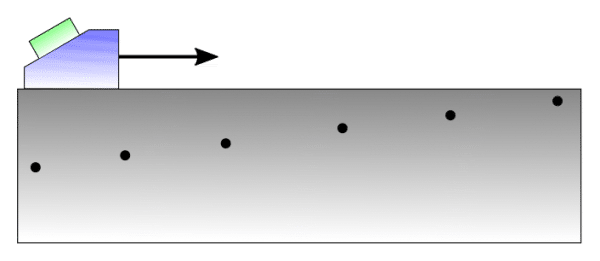
Bằng cách di đầu dò dọc theo bề mặt của khối mẫu thử nghiệm, chúng tôi đã thu được xung phản xạ từ các SDH ở các vị trí khác nhau. Các bộ dữ liệu FMC được thu thập tại mỗi vị trí quét để xử lý và tạo ra các bản đồ biên độ TFM. Thuật toán xử lý hậu kỳ được mô tả trong mục sau.
Tạo Bản đồ Biên độ TFM theo thực nghiệm
Các bước chính để tạo bản đồ biên độ TFM theo thực nghiệm là:
- Đối với một bất liên tục nhất định tại một vị trí quét cố định, sử dụng cổng đo độ sâu (trục z) để thu được đường biên độ phản hồi dọc theo chiều dài của bản đồ biên độ.
- Lặp lại bước 1 cho các vị trí quét khác nhau để thu được đường biên độ tổng hợp cho một lỗ khoan nhất định.
- Lặp lại các bước 1 và 2 cho tất cả các lỗ khoan khác để thu được các đường biên độ tổng hợp tại các vị trí z khác nhau.
- Nội suy các đường biên độ tổng hợp theo hướng z để có được bản đồ biên độ TFM cuối cùng.
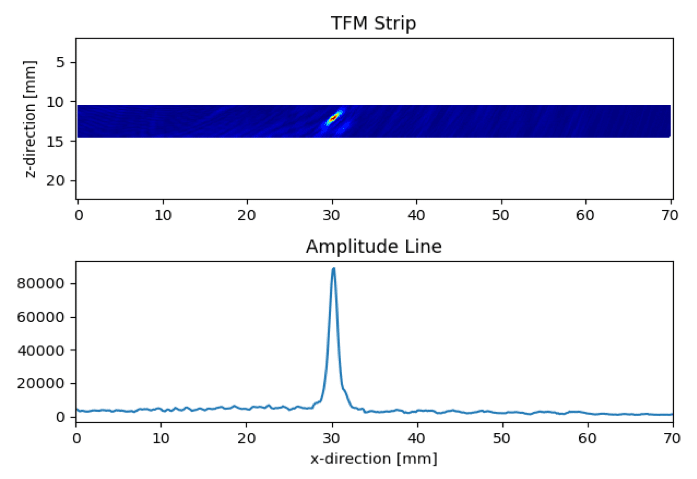
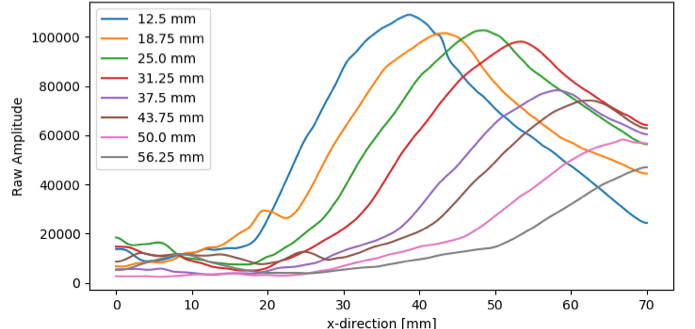
Bước 1 được minh họa trong Hình 3. Hình 3 cho thấy trước tiên chúng ta tạo thành dải biên độ phản hồi TFM dọc theo bản đồ biên độ ở độ sâu đo đọc trong cổng z. Vị trí của cổng z được chọn dựa trên độ sâu đã biết của lỗ khoan. Tại mọi vị trí x dọc theo dải TFM, biên độ cực đại được lấy theo hướng z để thu được đường biên độ ở dưới cùng của Hình 3.
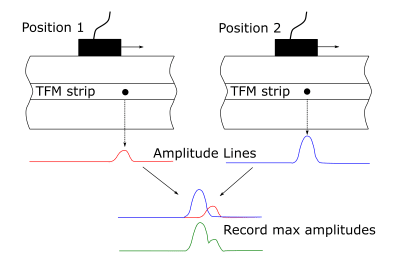
Để tạo đường biên độ tổng hợp cho một lỗ khoan nhất định, chúng tôi so sánh tất cả các đường biên độ thu được ở các vị trí quét khác nhau và ghi lại các giá trị biên độ tối đa. Quy trình này được minh họa trong Hình 4.
Sau khi hình thành đường biên độ tổng hợp cho một lỗ khoan nhất định, quá trình được lặp lại cho tất cả các lỗ khoan ở các độ sâu khác nhau. Hình 5 cho thấy các đường biên độ của tín hiệu xung-vọng theo TT mode từ các SDH có trong khối mẫu NAVSHIPS (cả hai hướng trên và dưới). Trong Hình 5 và tất cả các số liệu TFM thử nghiệm khác được trình bày trong bài viết này, biên độ của hình ảnh TFM không được chuẩn hóa. Do bộ số hóa sử dụng trong thiết bị OmniScan X3 là 12 bit và đầu dò chứa 32 phần tử, biên độ tối đa theo lý thuyết trong hình ảnh TFM là 2.097.152 (212 ÷ 2 × 32 × 32).
Lưu ý rằng các đường biên độ tổng hợp cho SDH ở độ sâu 6,25 mm (0,25 in.), 62,5 mm (2,5 in.) và 68,75 mm (2,7 in.) không thể hiện trong Hình 5. Do các SDH này gần với giới hạn bên của khối mẫu thử nghiệm, không thể có được các đường biên độ tổng hợp hoàn chỉnh dọc theo toàn bộ chiều rộng của bản đồ biên độ.
So sánh Bản đồ Biên độ TFM theo thực nghiệm với AIM
Bằng cách thực hiện phép nội suy trục z trên các đường biên độ tổng hợp được hiển thị trong Hình 5, chúng tôi đã thu được bản đồ biên độ TFM theo kinh nghiệm như trong Hình 6 (a).
Hình 6 (a) cho thấy kế hoạch quét TFM này có độ nhạy kém cả ở góc thấp (30)) và cao (> 70)). Độ nhạy kém ở các góc thấp là do các giá trị hệ số truyền nhỏ từ nêm Rexolite đến khối thử bằng thép [4]. Ngược lại, độ nhạy kém ở các góc lái cao là do lấy nét kém gây ra bởi hệ số hiệu quả hội tụ (effective F-numbers) cao [5]. Những phát hiện này phù hợp với các chỉ dẫn về góc được khuyến nghị cho các kiểm tra siêu âm phase array thông thường [6].
So sánh các hình 6 (a) và (b), rõ ràng mô hình âm thanh có thể dự đoán chính xác khu vực trong kế hoạch quét có độ nhạy tối ưu. Sự khác biệt giữa hai hình ảnh lý thuyết và thực tế có thể do sự thay đổi về tiếp âm khi đầu dò được dịch dọc theo bề mặt khối thử nghiệm. Lưu ý rằng biên độ của AIM lý thuyết giả định vì cực kỳ khó để mô hình chính xác cường độ của tín hiệu điện áp nhận được hệ thu/phát. Tuy nhiên, do các giả định nhất quán được sử dụng cho các AIM khác nhau, nên vẫn có thể so sánh độ nhạy âm thanh TFM của các kế hoạch quét khác nhau ở các chế độ khác nhau.
Xác nhận lỗ đáy bằng
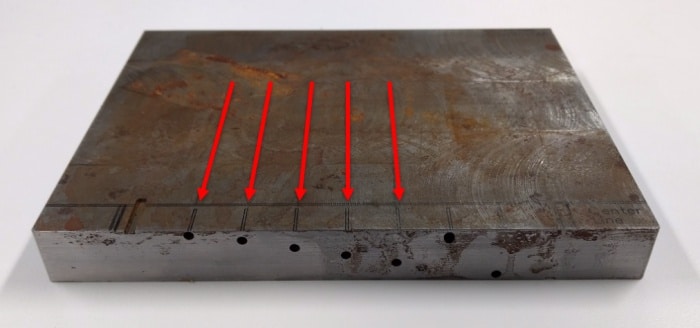
Để kiểm tra độ chính xác của mô hình âm thanh dự đoán độ nhạy biên độ cho các khuyết tật định hướng, chúng tôi đã tiến hành các thí nghiệm xác nhận trên một mẫu thử nghiệm được gia công. Khối thử nghiệm có độ dày 20 mm (0,8 in) và chứa FBH được khoan để phù hợp với cấu hình của mối hàn góc chữ J điển hình. Đối với nghiên cứu này, chúng tôi sử dụng 5 FBH có bề mặt đáy được định hướng 3º so với mặt phẳng nằm ngang. Hình ảnh của khối kiểm tra có trong Hình 7.
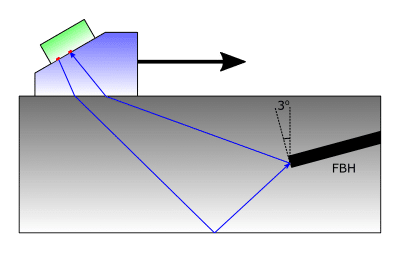
Trong thí nghiệm này, chúng tôi đã sử dụng đầu dò 5L32-A32 với tần số trung tâm là 5 MHz và khoảng cách phần tử là 1 mm. Đầu dò được ghép nối với nêm SA32-N55S-IHC. Do hướng của mặt đáy của FBH gần thẳng đứng, nên các bộ dữ liệu FMC thu được được xử lý ở chế độ siêu âm song song (Self-tandem chân thứ 2). Sơ đồ nguyên lý của kế hoạch quét được hiển thị trong Hình 8.
So sánh Bản đồ Biên độ TFM theo thực nghiệm với AIM
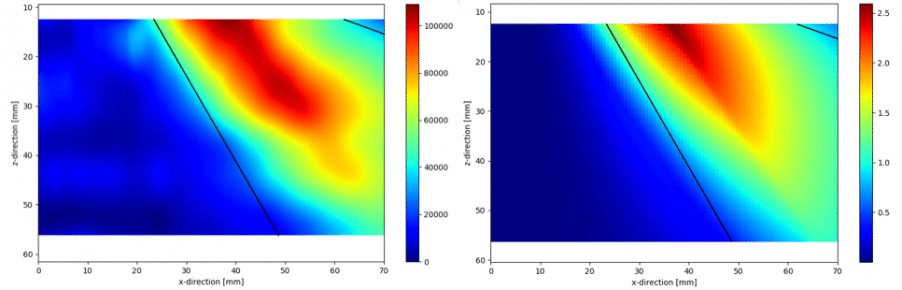
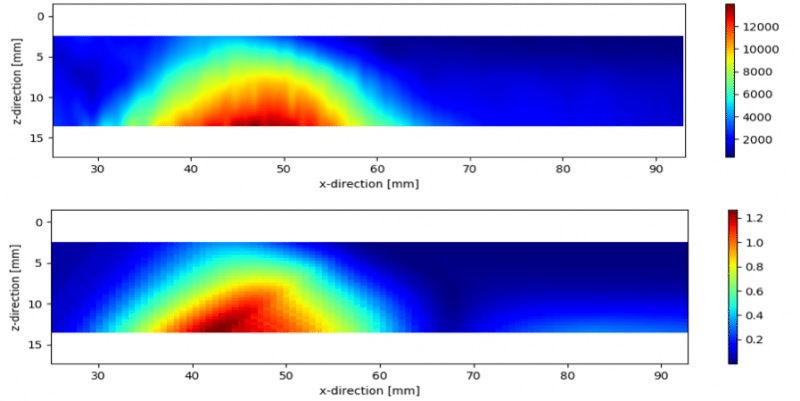
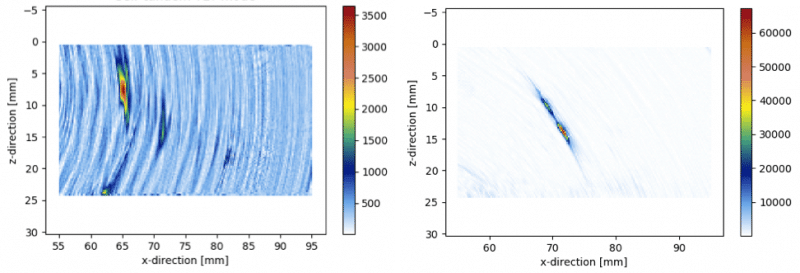
Bản đồ biên độ của FBH theo thực nghiệm và của FBH lý thuyết dựng bằng AIM cho chế độ TTT tương ứng được hiển thị trong Hình 9 (a) và (b). So sánh hai hình ảnh, rõ ràng là mô hình âm thanh đã đưa ra ước tính chính xác về độ nhạy âm tương đối trong vùng quét. Hình 9 cho thấy chế độ TTT (self-tandem) phù hợp hơn để phát hiện các khuyết tật phương dọc nằm gần đáy của mẫu thử.
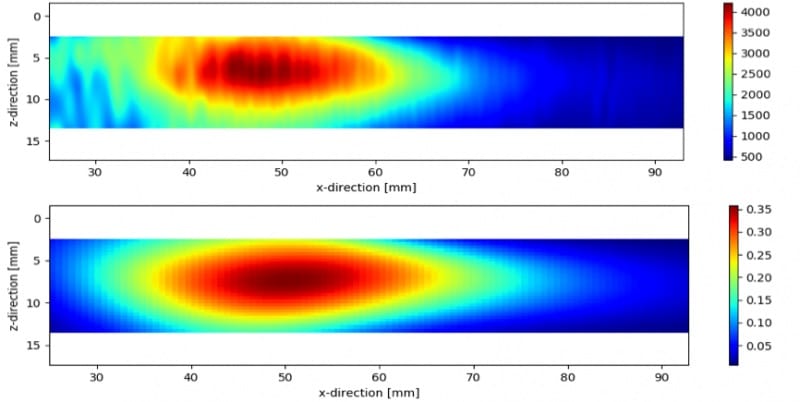
Bản đồ biên độ FBH theo thực nghiệm và AIM lý thuyết cho chế độ TLT (self-tandem) tương ứng được hiển thị trong Hình 10 (a) và (b). Một lần nữa, rõ ràng là mô hình âm thanh cung cấp một ước tính chính xác về độ nhạy âm tương đối trong vùng quét. Các chênh lệch giữa bản đồ biên độ thực nghiệm từ z = 25 mm (1 in.) đến z = 40 mm (1.6 in.) được gây ra bởi sự can nhiễu từ các chế độ đường truyền âm khác có thời gian di chuyển tương tự.
Ngoài ra, so sánh Hình 9 với Hình 10, chúng ta thấy rằng các tỷ lệ biên độ cực đại giữa hai chế độ là khoảng 3,3 (13800/4200) cho các bản đồ biên độ thực nghiệm và khoảng 3,4 (1,23 / 0,36) cho AIM lý thuyết. Sự giống nhau của các tỷ số biên độ cho thấy mô hình âm thanh cũng có thể được sử dụng để dự đoán độ nhạy âm tương đối trên các chế độ hình ảnh TFM khác nhau.
ỨNG DỤNG TIÊU BIỂU SỬ DỤNG AIM
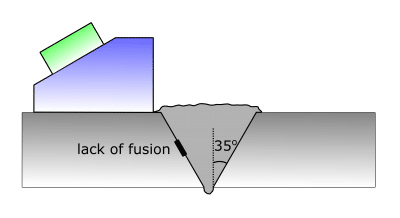
Để làm rõ thêm về lợi ích của mô hình phản hồi âm thanh, chúng tôi trình bày một ví dụ về ứng dụng trong môi trường thực, ở đó AIM lý thuyết được sử dụng để hướng dẫn lựa chọn chế độ kiểm tra TFM trên thiết bị OmniScan X3 của Olympus. Trong ví dụ này, chúng tôi đã kiểm tra một mẫu mối hàn mép vát V có khuyết tật không ngấu đã biết trước. Góc mép vát xấp xỉ 35 độ và chúng tôi đã sử dụng đầu dò 5L32-A32 và nêm SA32-N55S-IHC được sử dụng cho thí nghiệm xác nhận FBH. Sơ đồ nguyên lý của thiết lập thử nghiệm được hiển thị trong Hình 11.
Trong mô hình lý thuyết, khuyết tật không ngấu vách được mô phỏng bằng FBH đường kính 5 mm (0,2 in) có bề mặt đáy có góc 35 độ so với phương thẳng đứng. AIM lý thuyết tương ứng cho chế độ TLT và chế độ TTTT được hiển thị trong Hình 12.
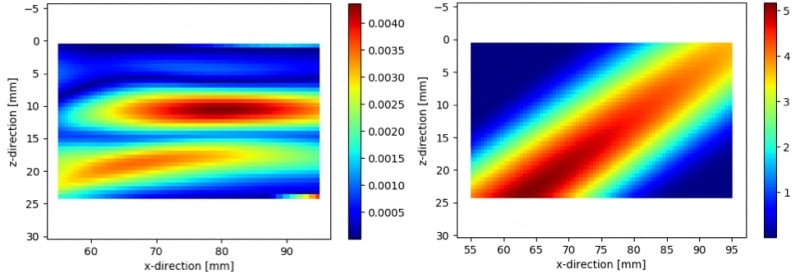
Hình 12 cho thấy ở trường hợp này, hình ảnh AIM ở chế độ TLT kém hơn nhiều so với chế độ kiểm tra sử dụng phương án phản xạ hai lần TTTT. Do đó, sử dụng chế độ TLT để đánh giá khuyết tật không ngấu vách sẽ khó khăn hơn khi sử dụng chế độ TLT. Ngoài ra, biên độ dự kiến từ chế độ TLT thấp hơn 3 lần so với chế độ phản xạ hai lần. Sử dụng các hình ảnh AIM lý thuyết này, chúng tôi dự đoán rằng chế độ kiểm tra phản xạ hai lần TTTT là chế độ phổ biến khi sử dụng TFM. Các hình ảnh TFM thử nghiệm tương ứng được hiển thị trong Hình 13.
Hình 13 chứng minh rằng hình ảnh TFM ở phương án phản xạ hai lần có SNR tốt và cung cấp khả năng đánh giá chính xác về kích thước của khuyết tật không ngấu vách mối hàn. Ngược lại, hình ảnh TFM theo phương án self-tandem có SNR thấp và chứa nhiều tín hiệu phản hồi khó diễn giải. Các tín hiệu phản hồi đơn lẻ thu nhận được có khả năng là các tín hiệu nhiễu xạ từ các đỉnh nhọn của khuyết tật không ngấu vách. Tuy nhiên, việc đánh giá khuyết tật cũng như kích thước chính xác là khó khăn khiwr sử dụng TLT.
Tỷ số SNR kém của hình ảnh TFM ở chế độ siêu âm song song với biên độ thấp được quan sát thấy trong AIM lý thuyết trong Hình 12 (a). Tuy nhiên, cần lưu ý rằng tỷ lệ biên độ xung phản hồi của hai chế độ trong Hình 13 thấp hơn tỷ lệ biên độ được dự đoán bởi AIM lý thuyết trong Hình 12. Vì hình dạng khuyết tật không ngấu vách khác với mô hình FBH được sử dụng để mô phỏng khuyết tật, biên độ của xung phản hồi nhiễu xạ từ các đầu nhọn của khuyết tật không ngấu vách có thể bị đánh giá thấp trong mô hình lý thuyết.
KẾT LUẬN
Chúng tôi đã trình bày về mô hình có thể dự đoán chính xác bản đồ biên độ phản hồi xung tín hiệu siêu âm TFM cho cả khuyết tật không định hướng và có định hướng. Đối với chế độ kiểm tra nhất định, mô hình có thể được sử dụng để điều chỉnh kế hoạch quét (độ mở/khẩu độ, tần số quét, vị trí đầu dò, v.v.) để tối ưu hóa SNR và xác suất phát hiện. Do mô hình cung cấp so sánh biên độ tương đối giữa các chế độ siêu âm khác nhau, nên nó cũng có thể được sử dụng để chọn chế độ TFM tối ưu. Trong tương lai, chúng tôi dự định mở rộng mô hình sang các tính toán hình học phức tạp hơn và bao gồm nhiều mô hình cho các tín hiệu và loại khuyết tật hơn.

Pingback: TFM/FMC là gì và ba ưu điểm của FMC/TFM trên thiết bị OmniScan X3 – VISCO NDT
Pingback: Ảnh hưởng của mép mối hàn khi sử dụng phương pháp siêu âm FMC/TFM – VISCO NDT