














Chapter VIII: Equipment used in the eddy current method
VIII.1. Ôn tập về nguyên lý đo:
Chúng ta thấy rằng đầu dò được đặc trưng bởi trở kháng trong trạng thái không tải (trong không khí) Zo được tính bằng L
Zo = j.Xo = j.Lo.
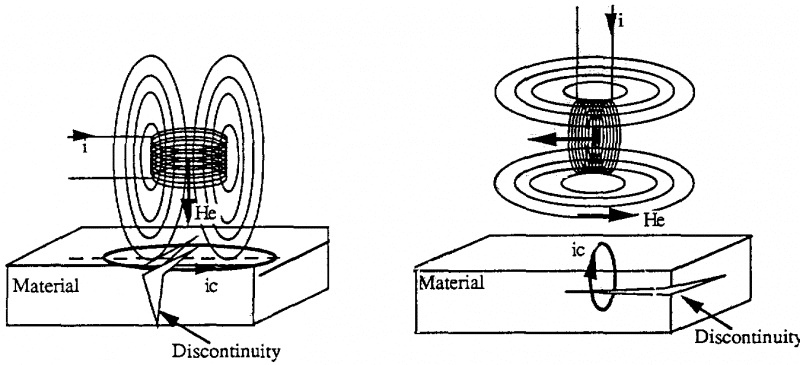
Khi đầu dò tiếp xúc hoặc gần vật dẫn kim loại, do hiện tượng cảm ứng điện từ, dòng điện xoáy xuất hiện trong vật đó. Hiện tượng đó dẫn đến sự thay đổi trở kháng của cuộn dây Z:
Z = R + j.X = R + j.L.
Nếu khuyết tật xuất hiện trong vật kiểm tra, khuyết tật đó sẽ ảnh hưởng tới dòng điện xoáy.
Kết quả là sự thay đổi Z của trở kháng Z của cuộn dây.
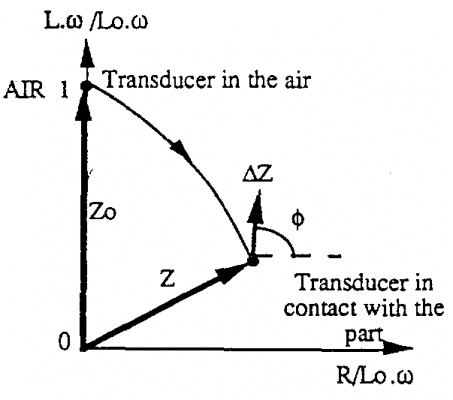
Chúng ta đã biết trong chương 6 rằng sự thay đổi trở kháng Z có thể được biểu diễn trên biểu đồ trở kháng bởi sự dịch chuyển của điểm hoạt động. Hướng dịch chuyển của điểm hoạt động trên biểu đồ trở kháng phụ thuộc vào tính chất của khuyết tật hoặc các yếu tố ảnh hưởng tới dòng xoáy.
Nguyên lý của phép đo bao gồm phát hiện hoặc đo bất cứ sự thay đổi trở kháng Z của trở kháng đầu dò khi xuất hiện khuyết tật.
Ta sẽ nói rõ về các thiết bị cho phép phân tích ít nhiều về sự thay đổi trở kháng Z.
Có những thiết bị khác cho phép phân tích, cung cấp thông tin về giá trị Z và còn về pha của sự thay đổi trở kháng Z (hướng dịch chuyển của điểm hoạt động).
Sự thay đổi của trở kháng Z thường được phát hiện nhờ sử dụng mạch cầu Wheatstone (xem chương 3).
VIII.2. Nnguyên lý hoạt động của các thiết bị:
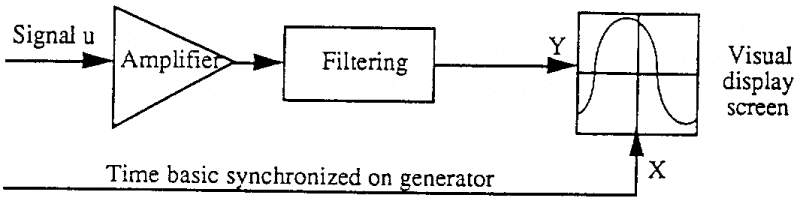
Nói chung mỗi thiết bị dòng xoáy đều có thể biểu diễn bằng sơ đồ khối sau:
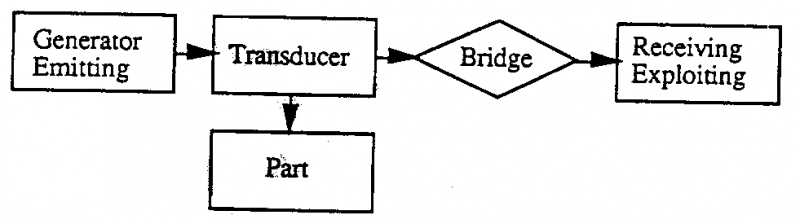
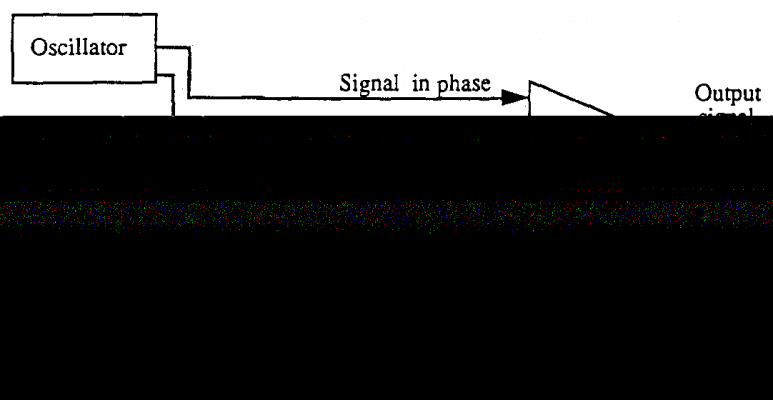
Chức năng phát được đảm bảo bởi thiết bị phát điện cung cấp dòng điện hình sin có tần số là tần số xác định bởi đầu dò.
Hệ thống phát hiện thường được lắp theo cầu trở kháng (cầu Wheatstone) từ đó chúng ta đo sự biến thiên do những ảnh hưởng tới dòng xoáy.
Tín hiệu đo được gửi tới mạch thu và khai thác.
Tín hiệu được khai thác sử dụng tương ứng với thiết bị sử dụng.
Phần lớn các thiết bị đơn giản giới hạn một giá trị đọc dạng cầm tay hoặc mặt hiện số chỉ cung cấp thông tin giá trị Z mà thôi.
Những thiết bị phức tạp khác được trang bị màn hình cho phép hiển thị biểu đồ trở kháng (ký hiệu XY), theo thời gian (ký hiệu Y/t), hoặc theo dạng Lissajou.
2.1. Thiết bị phát
Thiết bị phát bao gồm 2 phần:
o Bộ dao động điện áp hình sin với tần số cố định hoặc điều chỉnh được
o Bộ khuyếch đại
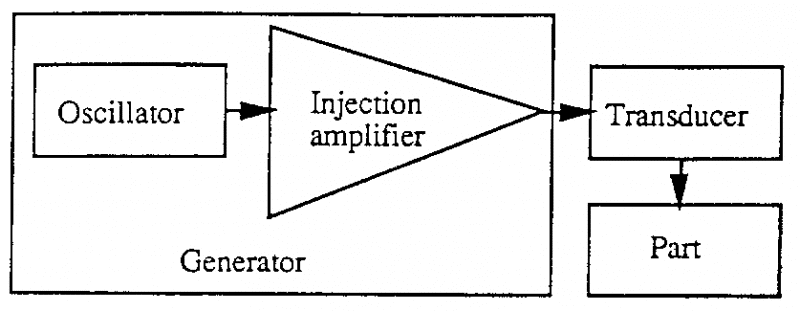
Một số thiết bị phát hoạt động với dòng điện cố định (bộ phát dòng), một số lại hoạt động với điện áp cố định (bộ tạo áp).
Ta có thể nói rằng thực hiện bộ phát áp đơn giản hơn bộ phát dòng.
Điều đó giải thích tại sao nói chung các thiết bị hoạt động với bộ tạo áp, đặc biệt trong những trường hợp thiết bị hoạt động với tần số cao (F 1 KHz).
Với tần số thấp, chủ yếu để kiểm tra sản phẩm vật liệu sắt từ cần có từ trường He cao, chúng ta sử dụng bộ phát dòng có khả năng cung cấp dòng cao. Trong trường hợp đó, chúng ta sử dụng đầu dò hai chức năng (xem chương 7).
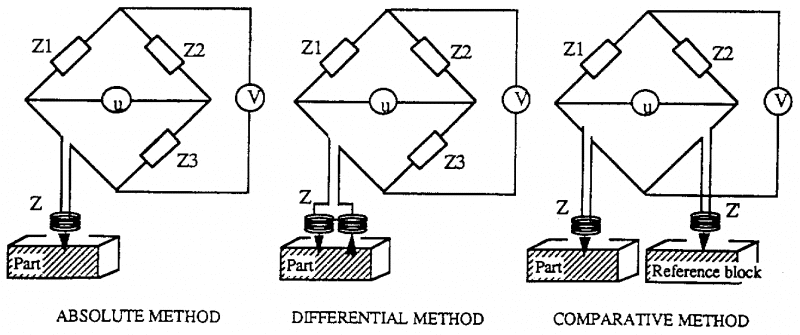
2.2. Hệ thống phát hiện
Để đơn giản chúng ta có thể nói rằng hệ thống phát hiện giống như cầu Wheatstone trong đó đầu dò là một phần của nó.
Những hình vẽ sau là những ví dụ về các mạch:
CÂN BẰNG ĐIỂM KHÔNG
Trước bất cứ phép đo hay kiểm tra nào, điều cần thiết là đưa cầu vào trạng thái cân bằng hay còn gọi là đặt điểm không.
Quá trình cân bằng là điều chỉnh các giá trị trở kháng theo trở kháng của đầu dò Z sao cho điện áp = 0.
Điều kiện đó được thực hiện khi (xem chương 3):
Z.Z2 = Z1.Z3
Như vậy sau khi cầu cân bằng, bất cứ sự thay đổi nào về trở kháng liên quan đến sự xuất hiện của khuyết tật hoặc bất cứ sự thay đổi nào của các yếu tố khác, sẽ lam xuất hiện một điện áp U, nó sẽ cho phép đo sự thay đổi trở kháng của đầu dò Z.
Ta cũng cần nhấn mạnh rằng sự cân bằng được thực hiện bởi sự điều chỉnh trên phần thực hoặc phần ảo của các trở kháng của mạch cầu.
Điều đó giải thích tại sao một số thiết bị có hai giá trị điều chỉnh ký hiệu R và X
Tùy theo loại thiết bị, cân bằng có thể thực hiện bằng tay hoặc tự động.
Ghi chú:
Có các hệ thống phát hiện khác trông phức tạp hơn nhiều.
Trong số đó có những thiết bị cho phép cân bằng tín hiệu không sử dụng mạch cầu mà sử dụng bộ cộng. Chúng ta cộng vào tín hiệu tiền khuyếch đại hai tín hiệu từ bộ dao động (một cùng pha, tương ứng phần trở kháng thực, còn lại cùng pha tổ hợp tương ứng phần trở kháng ảo) để thu được tín hiệu ra bằng không.
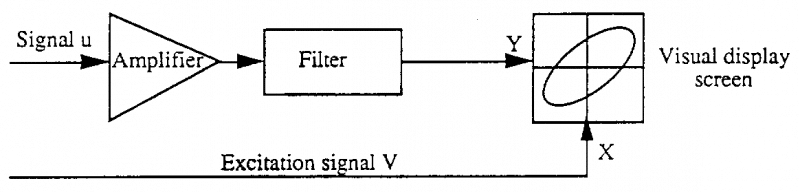
2.3. Hệ thống thu và khai thác
Hệ thống có các chức năng chính như sau:
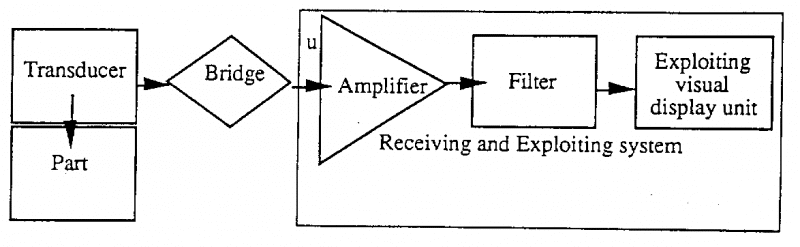
2.3.1. Khuyếch đại
Tín hiệu đầu ra của hệ thống phát hiện.
Sự khuyếch đại phải được điều chỉnh để tránh:
o Sự méo của tín hiệu
o Sự thay đổi pha của tín hiệu
o Nhiễu, đặc biệt khi làm việc với mức khuyếch đại cao
2.3.2. Lọc
Lọc luôn được yêu cầu để tránh bất cứ ảnh hưởng (tín hiệu hoặc nhiễu) nào gây khó khăn trong việc phát hiện và phân tích tín hiệu.
Những ảnh hưởng đó có thể được tạo ra từ những nguồn gốc khác nhau và các tần số khác nhau:
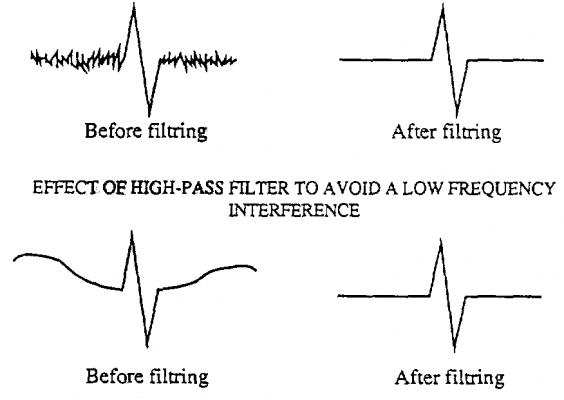
• Ảnh hưởng điện tử. Đó là tín hiệu tần số cao
• Tín hiệu tần số thấp liên quan đến sự dịch chuyển đầu dò trên chi tiết
• Tín hiệu tần số thấp liên quan đến sự thay đổi chậm về hình dạng của chi tiết
Các loại lọc:
• low pass: cho phép tín hiệu tần số thấp và tránh tín hiệu tần số cao
• high-pass: cho phép tín hiệu tần số cao và tránh tín hiệu tần số thấp
• band-pass: cho phép giữ tín hiệu tần số trung bình và tránh tín hiệu tần số cao và thấp. Nguyên tắc chung khi loại lọc này sử dụng, giải tần số -3dB được điều chỉnh trong khoảng từ F/2 đến 2F, trong đó F là tần số hoạt động .
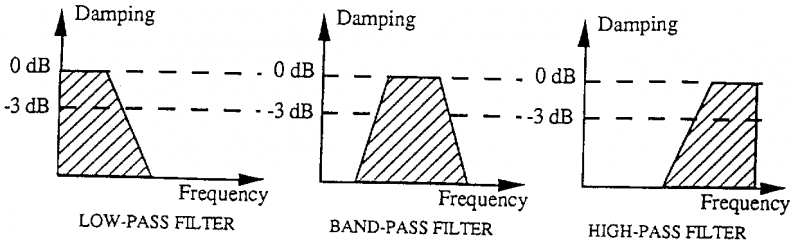
Những tần số mà độ suy giảm bằng 3dB được gọi là Breaking frequencies.
Nói chung lọc được thực hiện bằng mạch RC (điện trở và dung kháng) hoặc LC. Chúng được gọi là differentiator (RC) và intergrator (LC). Những mạch đó cho phép cho phép làm giảm các tín hiệu có tần số cao hoặc thấp.
Sau đây là những ví dụ về các loại lọc sử dụng.
Khi kiểm tra bằng phương pháp dòng xoáy, lọc sử dụng phải được chọn làm sao cho tín hiệu được ‘tinh khiết’ nhất có thể. Nó phải được chọn và cố định trong khi chuẩn và không được thay đổi sau đó.
Chú ý: sử dụng lọc rất có thể dẫn đến thay đổi pha của tín hiệu
Chọn dạng lọc:
Sự lựa chọn lọc tương ứng với trường hợp quan tâm. Nó phụ thuộc vào tần số của tín hiệu cần phân tích nhưng cũng phụ thuộc vào tần số của tín hiệu gây ảnh hưởng.
Sử dụng lọc yêu cầu đảm bảo rằng tốc độ dò không đổi và lọc lựa chọn thích hợp.
Lọc nên được chọn như sau:
• Low- pass: kiểm tra bằng tay tránh ảnh hưởng tần số cao (ví dụ nhiễu điện tử).
Bảng sau cung cấp thông tin về tốc độ kiểm tra cao nhất cho phép theo breaking frequencies được chọn (cho đầu dò với chiều rộng hoạt động 1 mm)
F = 3 Hz maxi-speed = 6 mm/s
F = 30 Hz maxi-speed = 60 mm/s
F = 300 Hz maxi-speed = 600 mm/s
– Band pass: Kiểm tra bằng đầu dò quay.
Lọc phải được chọn theo tốc độ quay của đầu dò, đường kính của cuộn dây và đường kính của thân đầu dò.
– High pass: kiểm tra bằng đầu dò quay hoặc kiểm tra bằng tay.
Trong trường hợp kiểm tra bằng tay, nếu breaking frequency được điều chỉnh tới giá trị thấp (10 Hz chẳng hạn). Nó cho phép tránh được những tín hiệu liên quan tới sự thay đổi hình dạng hoặc khe hở giữa đầu dò và chi tiết, nhưng giữ lại những tín hiệu có tần số lớn hơn như tín hiệu từ các vết nứt.
Bảng dưới đây cung cấp thông tin về tốc độ kiểm tra nhỏ nhất được lựa chọn theo breaking frequency (cho đầu dò với chiều rộng hoạt động 1 mm)
F = 3 Hz min-speed = 10 mm/s
F = 10 Hz min-speed = 30 mm/s
F = 30 Hz min-speed = 60 mm/s
F = 300 Hz min-speed = 900 mm/s
2.3.3. Khai thác
Chức năng của mạch khai thác này là đưa về sự thay đổi trở kháng Z của đầu dò từ điệ áp đơn giản u sau khi khuyếch đại và lọc.
Chúng ta đã biết từ chương 3 rằng điện áp xuất hiện ở các đầu cuối mạch cầu tỷ lệ với sự thay đổi trở kháng Z của đầu dò:
u V.Z
trong đó V là điện áp của máy phát cung cấp cho mạch cầu
a) Hiển thị trên mặt số hoặc bằng tay
Với phương pháp hiển thị này, thông tin là giá trị tỷ lệ với điện áp u; tỷ lệ với giá trị Z của sự thay đổi trở kháng Z.
Ta có thể thu được khi sử dụng điệ kế dạng tương tự hoặc hiện số.
Những thiết bị đó được thiết lập cho những ứng dụng chuyên dụng như đo độ dẫn điện, đo độ từ thẩm, đo chiều dày và thêm nữa để phát hiện các vết nứt mở trên bề mặt.
Điều chỉnh thiết bị để cho phép chỉ phát hiện hoặc đo đại lượng ta quan tâm và không nhạy với các yếu tố khác.
Ví dụ để phát hiện vết nứt chẳng hạn, điều chỉnh thiết bị để phát hiện các vết nứt nhưng không nhạy với hiệu ứng lift –off (khe hở).
Điều đó ta thu được nhờ sự quay pha: ROTARY PHASE
Trên một số thiết bị, ROTARY PHASE được gọi là LIFT-OFF.
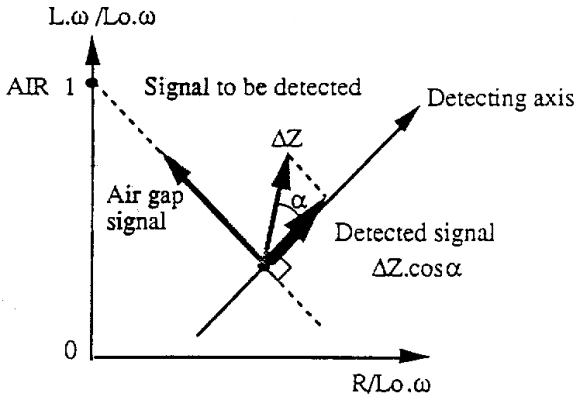
Sự điều chỉnh đó chỉ có thể hiểu từ sự biểu diễn trên sơ đồ trở kháng.
Chúng ta hãy tưởng tượng trên mặt phẳng đó, thiết bị chỉ có thể phát hiện được các tín hiệu chỉ theo theo hướng nhất định. Chúng ta phát hiện hình chiếu của sự thay đổi trở kháng Z theo hướng này.
Điều chỉnh ROTARY PHASE hoặc LIFT-OFF trong sơ đồ trở kháng đến khi nó vuông góc với tín hiệu từ khe hở.
Trên một số thiết bị sự điều chỉnh này được làm bằng tay hoặc tự động.
Nói chung, đo độ dẫn điện, độ từ thẩm hoặc chiều dày được điều chỉnh trước bởi nhà chế tạo. Chúng ta phải xác định bằng thực nghiệm giá trị khe hở lớn nhất mà sau giá trị này phép đo sẽ không còn đúng.
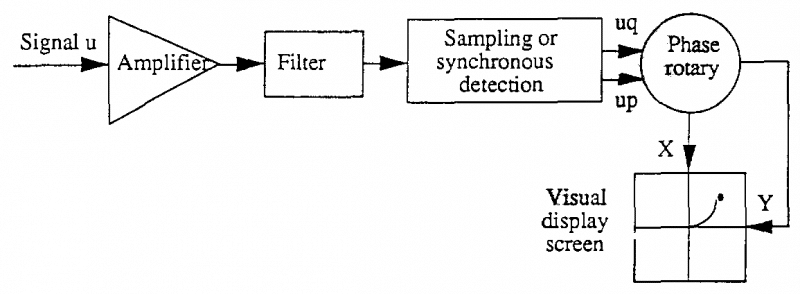
b) Hiển tín hiệuị theo tín hiệuời gian Y/t
phương pháp hiển thị này bao gồm sự biểu diễn trên màn hình điện áp u theo thời gian t.
Được thực hiện bằng phát điện áp u, khuyếch đại và lọc trên trục Y của màn hình. Trên trục X cung cấp điện áp thay đổi (hàm tuyến tính với thời gian) có cùng tần số với điện áp cung cấp bởi máy phát.
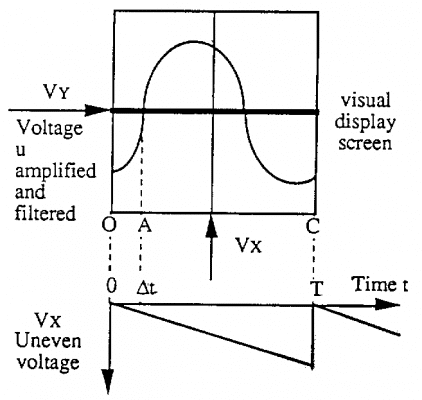
Chúng ta tín hiệu ấy rằng khi cầu cân bằng, không tín hiệu thì điểm chuyển động theo đường nằm ngang.
Chúng ta đã biết điện áp u: u V.Z
Điện áp thay đổi được phát theo X của màn hình đồng bộ với điện áp cung cấp bởi máy phát. Điện áp V = Vo.cos (t)
Do đó
u Vo.Z.cos (t + )
Độ lớn tín hiệu phát theo Y tỷ lệ với giá trị Z của sự thay đổi trở kháng của đầu dò.
Pha của nó tương ứng với pha của Z
Pha có thể được suy ra từ biểu thức:
= 2.t/T
= 2.OA/OC
Mạch khai thác tương ứng với phương pháp hiển thị này có thể biểu diễn bằng sơ đồ sau:
Ghi chú:
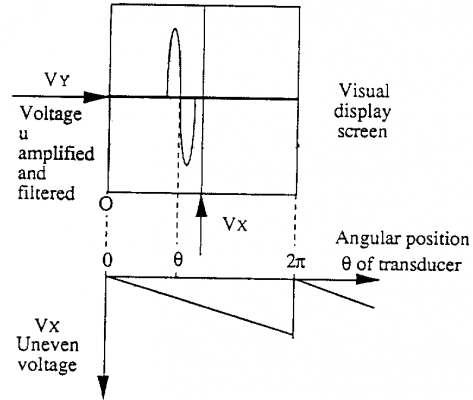
Trong trường hợp kiểm tra lỗ tự động bằng đầu dò quay, chúng ta thường sử dụng chế độ Y/t
Trong trường hợp này điều chỉnh thời gian gốc là rất khó khăn. Bởi vì thời gian gốc trên máy phát là không đồng bộ nhưng lại đồng bộ trên sự quay tròn của đầu dò.
Chiều dài của trục X hay màn hình không tương ứng với chu kỳ T = 1/F của tín hiệu cung cấp bởi máy phát, nhưng lại tương ứng thời gian cần thiết cho đầu dò thực hiện một vòng quay (3600).
Phương pháp hiển tín hiệuị này có thể gọi Y/, trong đó là vị trí góc của đầu dò trong lỗ.
c) Hiển thị theo dạng Lissajou:
Phương pháp hiển tín hiệuị này bao gồm sự biểu diễn trên màn hình điện áp u theo điện áp V hình sin cung cấp bởi máy phát.
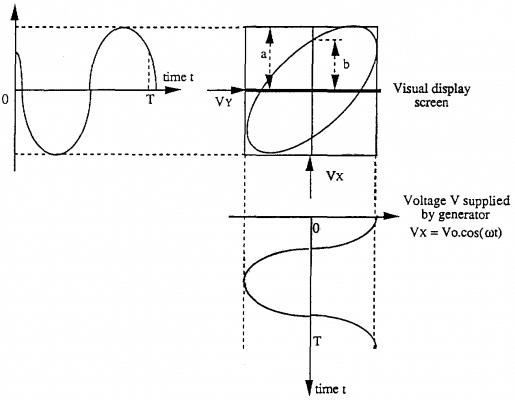
Khi không có tín hiệu, điện áp bằng 0, điểm chuyển động trên màn hình theo đường thẳng nằm ngang.
Khi có tín hiệu, hình dạng tín hiệu ta thu được giống như hình elíp.
Chúng ta có thể xác định pha của điện áp u
= arcsin b/a
Đúng vậy, thay V = Vo.cos(t) và u = Uo.cos(t + )
Uo là giá trị lớn nhất biên độ)của u.
Khi t = T/4, V = Vo và u = Uo.cos(/2 + ) = -Uo.sin
Đặt a = Uo, b = -Uo.sin suy ra b/a = -sin hay = arcsin b/a
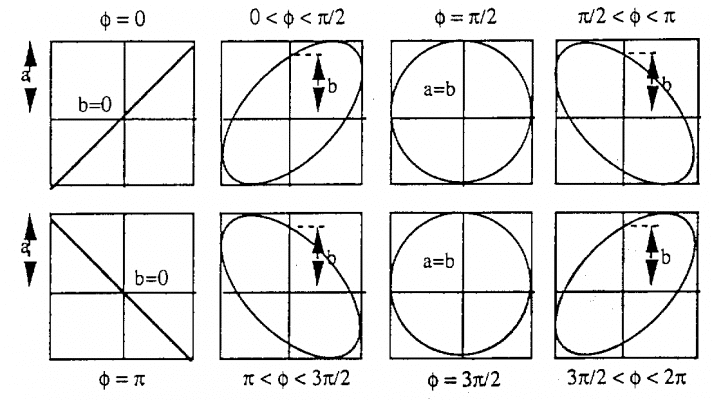
Do vậy nếu chúng ta điều chỉnh thiết bị bằng cách phát điện áp theo X và Y của màn hình, các điện áp có biên độ cực đại bằng nhau, hình elíp của tín hiệu sẽ thay đổi giữa đường thẳng và đường tròn.
Sau đây là các hình dạng và hướng của hình elíp theo sự thay đổi của pha
Mạch khai thác tương ứng với phương pháp hiển thị này như sau:
Phương pháp kiểm tra này chủ yếu sử dụng để chọn vật liệu.
d) Hiển thị theo sơ đồ trở kháng XY
Đối với phương pháp hiển thị này, mục đích của mạch khai thác này cho phép hiển thị sự thay đổi Z trong sơ đồ trở kháng .
Sự thay đổi Z có thể biểu diễn dạng số phức như sau:
Z = R + j.X
Có thể quay trở lại sự thay đổi trở kháng Z biến đổi điện áp u thành hai điện áp up và uq trong tổ hợp pha ( lệch pha nhau /2).
Các điện áp up và uq tương ứng tỷ lệ R và X
Thực vậy, điện áp u có thể viết:
u V.Z
u V.R + j. V.X
trong đó
u = up + uq
Có thể thực hiện bằng cách sử dụng nhiều dạng mach khác nhau. Mạch chính sử dụng trong thiết bị dòng xoáy:
– phát hiện bằng đối chứng
– phát hiện đồng bộ
Nguyên lý hoạt động của những mạch đó tương đối phức tạp nên chúng ta cũng sẽ không đề cập tới ở đây.
Sau khi khai thác, up và uq được phát theo X và Y của màn hình hiển thị, cho phép hiển thị trên sơ đồ trở kháng (X và Y biểu thị phần thực và ảo của trục tọa độ trở kháng).
Khi không có khuyết tật, cầu Wheatstone cân bằng, điện áp bằng 0
Nó được hiển thị bằng điểm nằm ở giữa màn hình.
Trong trường hợp cầu mất cân bằng, ta nhìn thấy sự dịch chuyển của điểm đó trên màn hình. Sự dịch chuyển này tương ứng với sự dịch chuyển của điểm hoạt động được mô tả ở chương 6.
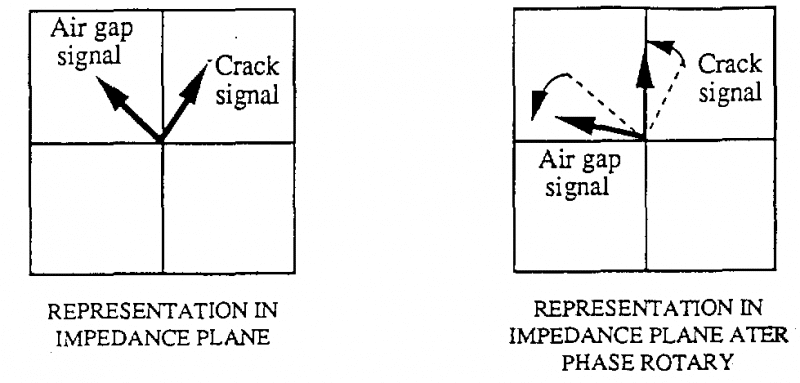
Quay pha
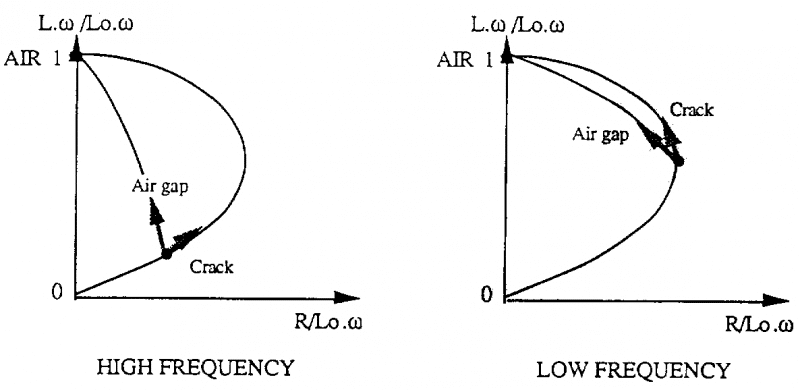
Ta đã biết rằng hướng dịch chuyển của điểm hoạt động phụ thuộc vào tính chất của yếu tố gây ra tín hiệu.
Trong thực tế, để sự phân tích đơn giản hơn và để thuận lợi hơn cho phát hiện khuyết tật chúng ta tạo hướng cho loại khuyết tật mà ta cần phát hiện, điểm hoạt động sẽ dịch chuyển theo hướng đó.
Ví dụ, trong trường hợp dò tìm vết nứt, chúng ta điều chỉnh thiết bị sao cho tín hiệu từ vết nứt dịch chuyển theo hướng thẳng đứng, và tín hiệu từ sự thay đổi khe hở sẽ dịch chuyển theo phương nằm ngang trên màn hình.
Ta thu được điều đó bằng cách quay pha
Mạch khai thác được tóm tắt như sau:
Ngưỡng và cảnh báo:
Để công việc kiểm tra được thuận lợi, thiết bị dòng xoáy nói chung được trang bị cảnh báo bằng âm thanh hoặc ánh sáng.
Hoạt động của sự cảnh báo phụ thuộc vào sự đặt ngưỡng.
Trên các thiết bị có biểu đồ trở kháng, ta có thể tìm thấy các dạng ngưỡng khác nhau
– Đối xứng và không đối xứng trên trục Y
– Ngưỡng tròn cho giá trị |Z|
– Ngưỡng hình chữ nhật
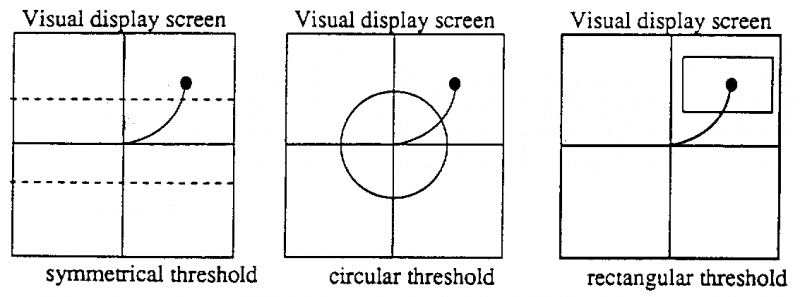
Cảnh báo cũng có thể hoạt động theo ngưỡng chọn như trên, dưới, trong, ngoài…
Chọn và điều chỉnh ngưỡng phụ thuộc vào loại khuyết tật cần phát hiện và còn phụ thuộc vào tín hiệu không mong muốn.
VIII.3. Điều chỉnh và chuẩn thiết bị.
Khi kiểm tra, sau khi xác định loại thiết bị sử dụng và tần số hoạt động, ta cần phải điều chỉnh thiết bị.
Những bước điều chỉnh mà ta cần phải thực hiện thường được tiến hành theo trình tự sau:
– Lắp trở kháng của thiết bị và đầu dò theo dây dẫn phù hợp
– Điều chỉnh tần số
– Điều chỉnh lọc
– Cân bằng (zero)
– Điều chỉnh khuyếch đại (độ nhạy)
– Điều chỉnh pha
– Điều chỉnh ngưỡng
Ghi chú:
Có những thiết bị được cài đặt chức năng cho phép mở rộng giải của trục Y so với giải của trục X trên màn hình.
Chức năng đó tương ứng với sự khuyếch đại riêng rẽ thành phần X và Y của tín hiệu được gọi là khuyếch đại X, khuyếch đại Y hoặc khuyếch đại XY.
Chức năng này chủ yếu sử dụng để tối ưu hóa tín hiệu, đặc biệt là để phân biệt tốt hơn tín hiệu từ khuyết tật và từ những tín hiệu khác.
3.1. Lựa chọn tần số kiểm tra
Sự lựa chọn tần số kiểm tra thường được xác định từ trường hợp kiểm tra, từ mục tiêu kiểm tra
Mục tiêu thứ nhất: chiều sâu thẩm thấu đủ để phát hiện khuyết tật
Yêu cầu thứ nhất cần quan tâm là đảm bảo độ xuyên sâu của dòng xoáy đủ để phát hiện khuyết tật nằm ở đó.
Trong trường hợp kiểm tra chi tiết phẳng bằng đầu dò bề mặt, tần số kiểm tra cần được đánh giá từ cách tính chiều sâu thẩm thấu qui ước của dòng điện xoáy.
Tần số kiểm tra được tính bằng biểu thức
F = 1/(...2)
bằng cách chọn như là độ sâu lớn nhất mà khuyết tật có thể xuất hiện.
Tần số kiểm tra cũng có thể được tính từ công thức trong chương 5, trang 8.
Mục tiêu thứ hai: Phân biệt được giữa các tín hiệu phát hiện khuyết tật và tín hiệu khác
Trong trường hợp kiểm tra thanh đặc hình trụ, công thức trong chương 5 có thể sử dụng với độ chính xác tốt khi mà tỷ số F/Fg 100
Trong trường hợp F/Fg < 10, độ sâu đáng kể và độ nhạy thấp
Trong trường hợp F/Fg >> 10, độ sâu nhỏ và độ nhạy cao.
Mục tiêu thứ ba: Xác định độ sâu khuyết tật
Nói chung, nếu chúng ta muốn độ sâu thẩm thấu và độ nhạy phân biệt trong pha, đủ cho cả hai, ta nên chọn tỷ số F/Fg khoảng 15 (10 F/Fg 20)
Bên cạnh đó với tỷ số F/Fg khoảng từ 10 đến 20, chúng ta phân biệt dễ dàng hơn sự thay đổi là đối với sự thay đổi độ dẫn điện.
Trường hợp các ống tuýp:
Trong trường hợp kiểm tra ống tuýp, chúng ta sử dụng tần số sao cho tỷ số F/Fg dẫn đến sự khác nhau về pha, giữa dòng xoáy bề mặt trong và ngoài của ống tuýp, gần giá trị = 900.
Khi chúng ta biết tỷ số di/de, sau đó tỷ số F/Fc được xác định bằng sơ đồ trang 17 chương 5. Ví dụ nếu chúng ta kiểm tra ống tuýp với tỷ số di/de = 0,90, chúng ta sẽ chọn tần số kiểm tra F/Fc = 550.
Đối với ống tuýp mỏng (di/de > 0,85) theo sơ đồ trang 9 chương 5, độ lệch pha = 900 ta thu được với tỷ số F/Fc = 1,4
Ghi chú quan trọng:
Sự tính toán bằng lý thuyết không cho phép đánh giá tần số sử dụng. Trong mọi trường hợp giá trị tính bằng lý thuyết phải được kiểm tra lại bằng thực nghiệm.
3.2. Hiệu chuẩn
Điều chỉnh thiết bị là bước quan trọng để thực hiện tốt công việc kiểm tra.
Điều chỉnh độ khuyếch đại cũng rất quan trọng vì kết quả kiểm tra phụ thuộc vào biên độ tín hiệu phát hiện được so với ngưỡng đã đặt trước.
Điều chỉnh thiết bị phải được thực hiện bằng mẫu đối chứng cũng gọi là mẫu chuẩn.
Bước đó được gọi là hiệu chuẩn
Mẫu đối chứng sử dụng phải thích hợp với chi tiết kiểm tra.
Chúng phải:
• Cùng bản chất (vật liệu giống nhau)
• Xử lý nhiệt hay cơ khí giống nhau
• Cùng kích thước
Ngoài ra, mẫu đối chứng phải bao gồm khuyết tật thật hoặc nhân tạo. khuyết tật của Mẫu đối chứng phải sao cho:
• Hình dạng của chúng (nhỏ hay lớn)
• Kích thước
• Vị trí trong chi tiết (hướng, độ sâu…)
Giống khuyết tật thật cần phát hiện nhất có thể.
Ghi chú: Tiêu chuẩn NFA49872 và NFA49892 xác định mẫu đối chứng sử dụng cho kiểm tra ống tuýp bằng ống dây.