















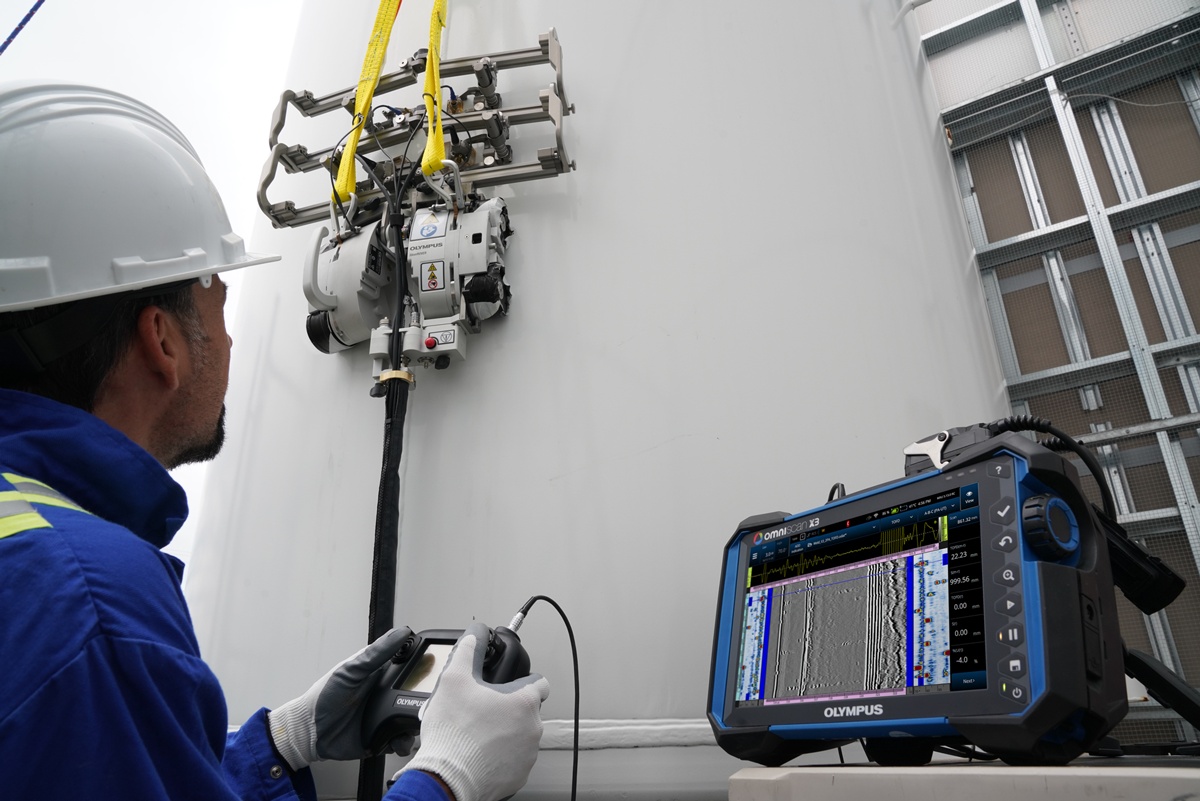
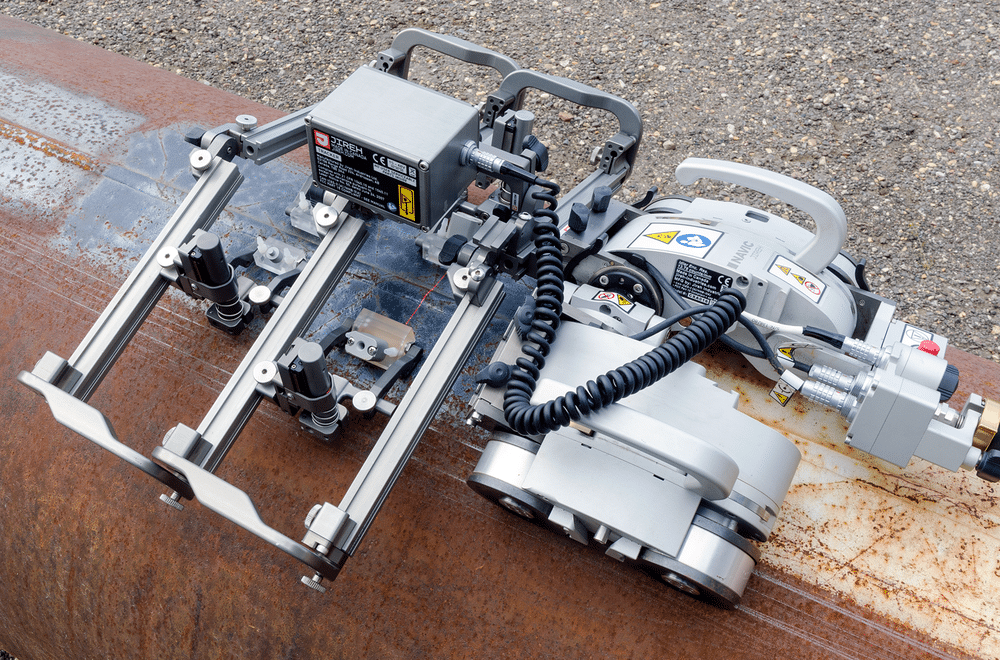
Crawler SteerROVER™ để kiểm tra mối hàn và lập bản đồ ăn mòn
全自動スキャナー、移動方向、リモートコントロールを変更できます。
デバイスに類似 MapROVER™ しかし、移動の方向を操縦して変更する機能で強化されています。圧力容器のような大きくて届きにくい表面は、もはや手の届かないものではありません。スキャナは、スイープ アームを使用して腐食マッピング コーディング ジョブを実行したり、適切な治具を使用して溶接検査を実行するように構成することもできます。
かさばるコンピューターを制御またはセットアップする必要はありません。操作は、コントローラーとデバイス間のケーブル接続だけで、タッチ スクリーンを使用してコントローラーで直接実行されます。 オムニスキャン X3 良い FOCUS PX™.

Hệ thống quét linh hoạt có thể được cấu hình với một cánh tay raster có động cơ để thực hiện giám sát ăn mòn hoặc giá đỡ đầu dò để kiểm tra cả mối hàn dọc và mối hàn chu vi. Tăng cường khả năng căn chỉnh vị trí cho máy quét bằng cách thêm bộ máy ảnh RECON tùy chọn. Việc lắp đặt camera trên máy quét có thể giúp bạn điều hướng ở khoảng cách xa và xác minh rằng đầu dò PA được định vị tối ưu để thu được dữ liệu chất lượng cao.
構成
Máy quét SteerROVER có thể được đặt hàng theo các cấu hình khác nhau tùy thuộc vào ứng dụng (mối hàn hoặc ăn mòn) và bằng cách kết hợp các tùy chọn chiều dài cáp và cánh tay raster khác nhau.

溶接試験構成
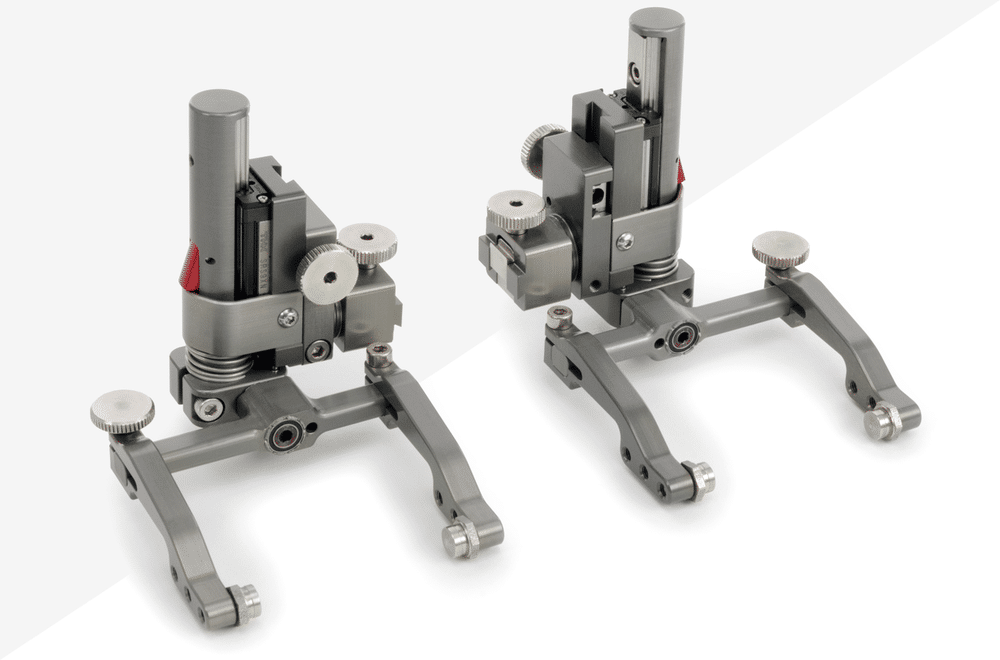
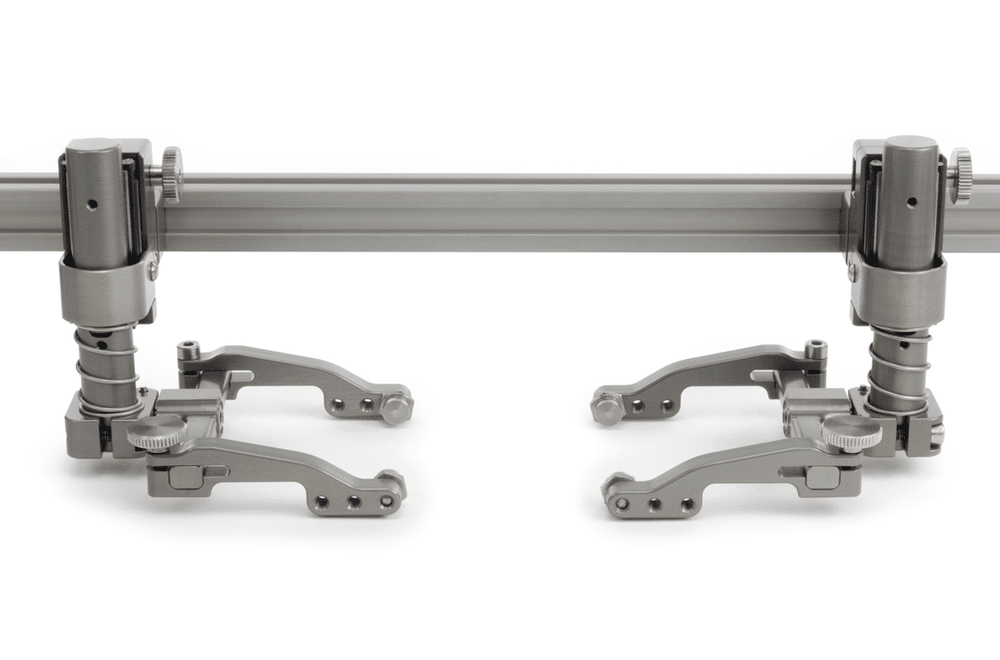
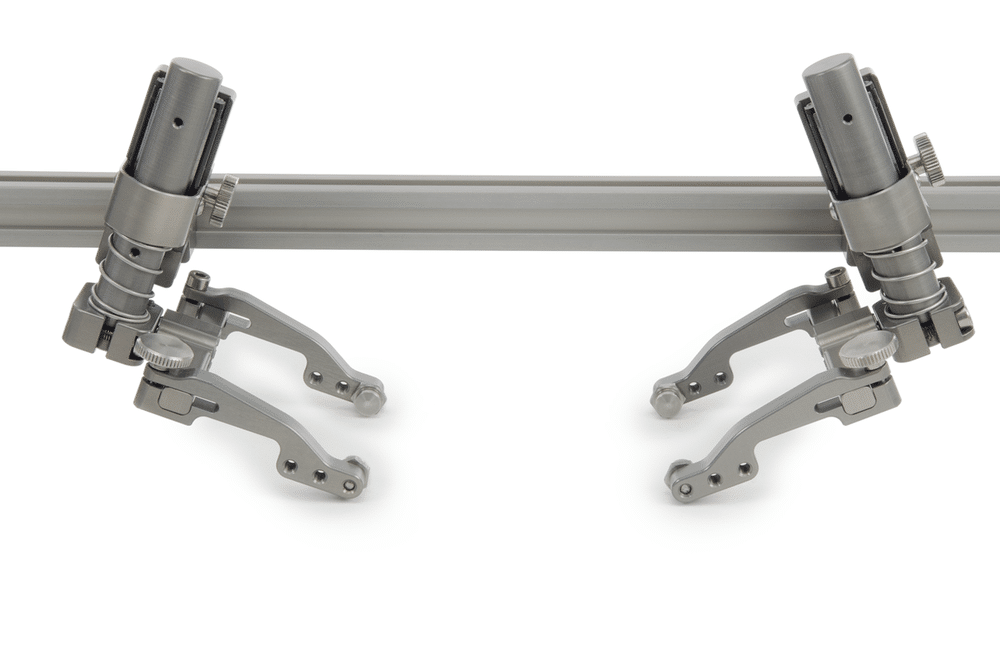
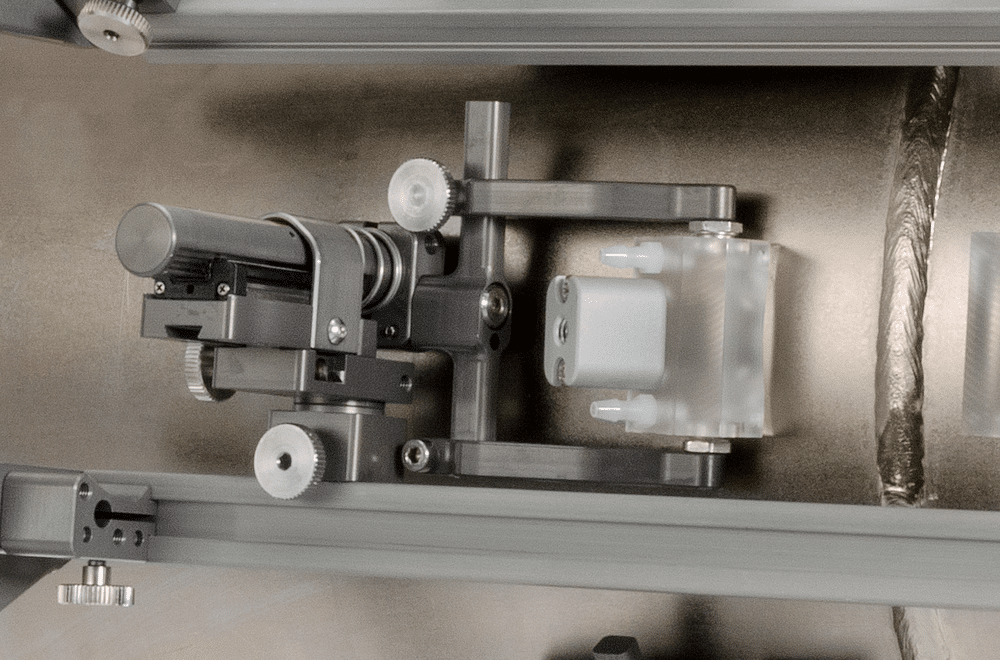
SteerROVER 自動スイーパーと、パイプまたはリング溶接部の検査用の曲げ可能なプローブ ホルダー。

溶接試験構成
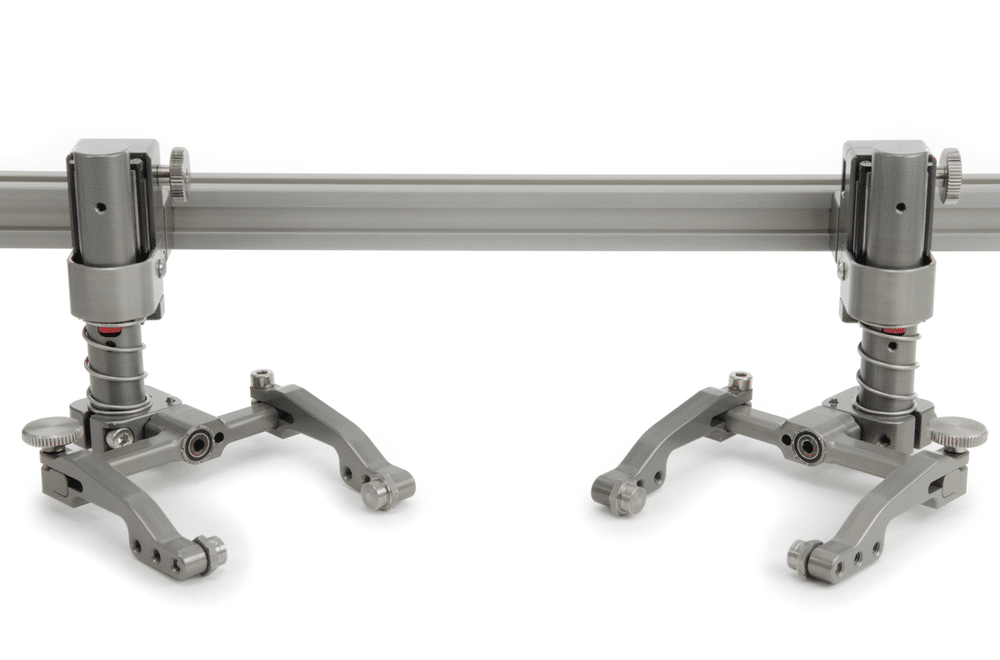
ラスター ハンドで使用する場合、SteerROVER は完全に自動化された腐食試験に最適なソリューションです。

Sử dụng với Camera
Bộ RECON hai camera có thể được thêm vào máy quét SteerROVER để hỗ trợ điều hướng ở khoảng cách xa, giữ mối hàn ở chính giữa và giúp đảm bảo rằng đầu dò vẫn tiếp xúc với bề mặt.
Đặc trưng
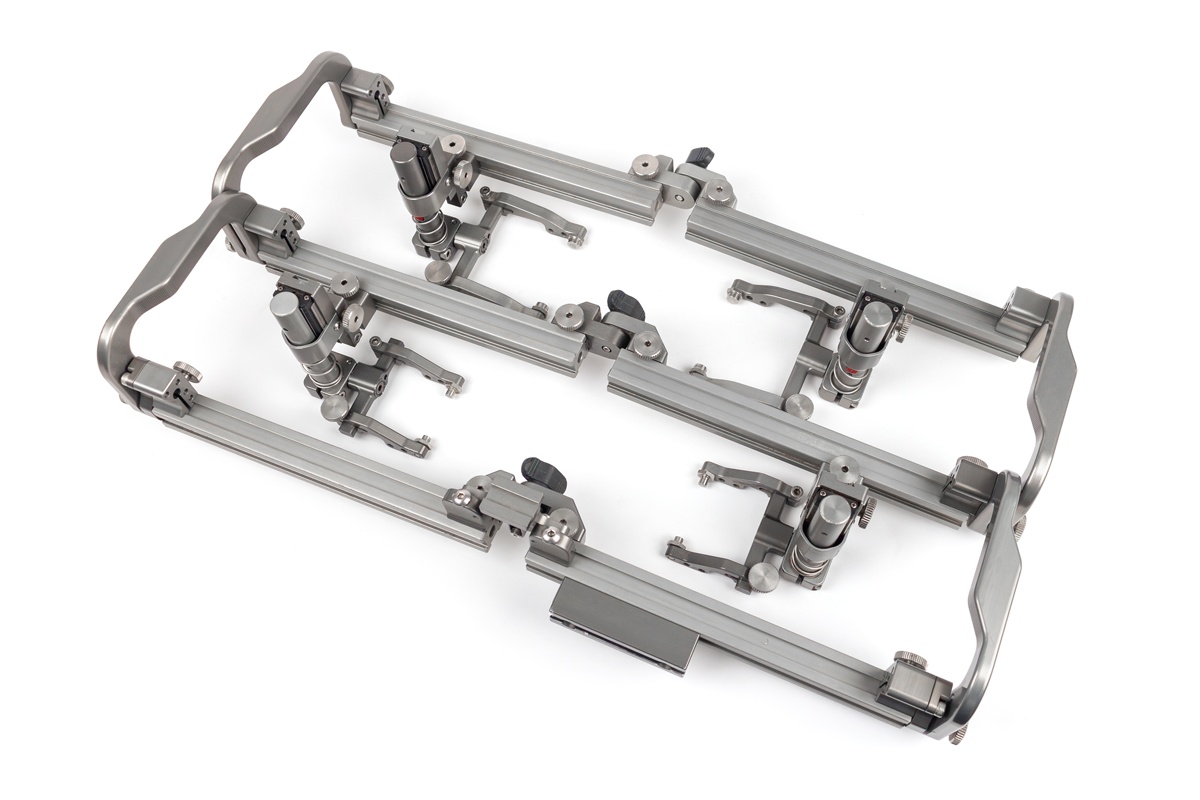
- Máy quét có thể điều khiển hướng bao gồm hai thân với động cơ độc lập và bốn bánh xe từ tính mạnh.
- Điều khiển từ xa màn hình cảm ứng với hai cần điều khiển; có thể định cấu hình để chuyển động của máy quét yêu cầu đầu vào của người dùng liên tục (chạy bộ) hoặc để một đầu vào khởi động máy quét và một giây sẽ dừng.
- Có sẵn hai mẫu quét raster tự động.
- Có thể được đặt hàng với các lựa chọn khác nhau về cánh tay raster có động cơ để kiểm tra ăn mòn hoặc giá đỡ đầu dò để kiểm tra mối hàn với bốn đầu dò (tăng lên sáu đầu dò với giá đỡ đầu dò tùy chọn).
- Các nút dừng khẩn cấp nằm trên máy quét và trên bộ điều khiển nguồn.
- Ống dẫn cáp có thể chia cắt cung cấp khả năng bảo vệ cáp và cấu hình linh hoạt.

主な利点
- 足場を設置する必要はありません: 独立したモーターを備えた 2 つのポッドと 4 つの強力な磁気ホイールを備えた操縦可能なスキャナーで、手の届きにくい場所を検査します。
- 簡単操作: 直観的なタッチ スクリーン リモートと 2 つのジョイスティックを使用して、マッピングする溶接またはゾーンに対するスキャナの位置を調整します。
- 複数の制御オプション: スキャナの移動に継続的なオペレータ入力が必要になるように、またはオペレータが瞬間的な入力を提供したときに移動が開始され、次の入力までそのままになるように、リモートを構成します。 2 つの自動ラスター スキャン パターンも利用できます。
- フレキシブル: 腐食検査用の電動ラスター アームまたは溶接検査用の 4 プローブ ホルダー ラックから選択します (オプションのプローブ ホルダーを使用すると 6 プローブに増加します)。
- 安全設計: スキャナと電源コントローラにある非常停止ボタン。
- 頑丈: 分割可能なケーブル コンジット アンビリカルは、保護と柔軟な構成を提供します。
- 多くの要件を満たす: プローブラックは、周方向および縦方向の溶接検査に使用できます。
Trang bị tiêu chuẩn
- Máy quét có động cơ có thể điều khiển được.
- Điều khiển từ xa màn hình cảm ứng.
- Bộ điều khiển điện.
- Dây cáp có thể tháo rời với ống bảo vệ có thể chia được.
- Cáp mã hóa liên kết với máy dò khuyết tật dòng OmniScan (thế hệ hiện tại) và thiết bị FOCUS PX.
- Ống dẫn nước.
- Hộp đựng.
- Cánh tay raster có động cơ hoặc giá đỡ đầu dò (tùy thuộc vào cấu hình).

Cánh tay raster có động cơ:
Giá đỡ đầu dò có lò xo tương thích với máy quét HydroFORM™, đầu dò ăn mòn Dual Linear Array™ và hầu hết các nêm mảng pha được trang bị IHC.
Giá đỡ đầu dò xoay:
- Bốn giá đỡ đầu dò có lò xo.
- Hai kẹp có thể điều chỉnh để giữ đầu dò mảng pha (rộng tới 57,6 mm và dài 48,5 mm).
- Hai kẹp có thể điều chỉnh để giữ đầu dò TOFD-P/E (rộng tới 45 mm và dài 36,8 mm).

Hệ thống Camera RECON:
- Hai camera (chính và vệ tinh).
- Máy tính bảng có cài đặt phần mềm RECON Studio và bộ sạc.
- Cáp dài 30 m kết nối máy ảnh với máy tính bảng.
- Cáp ngắn để kết nối camera vệ tinh với camera chính.
- Giá đỡ để gắn camera vào máy quét SteerROVER.
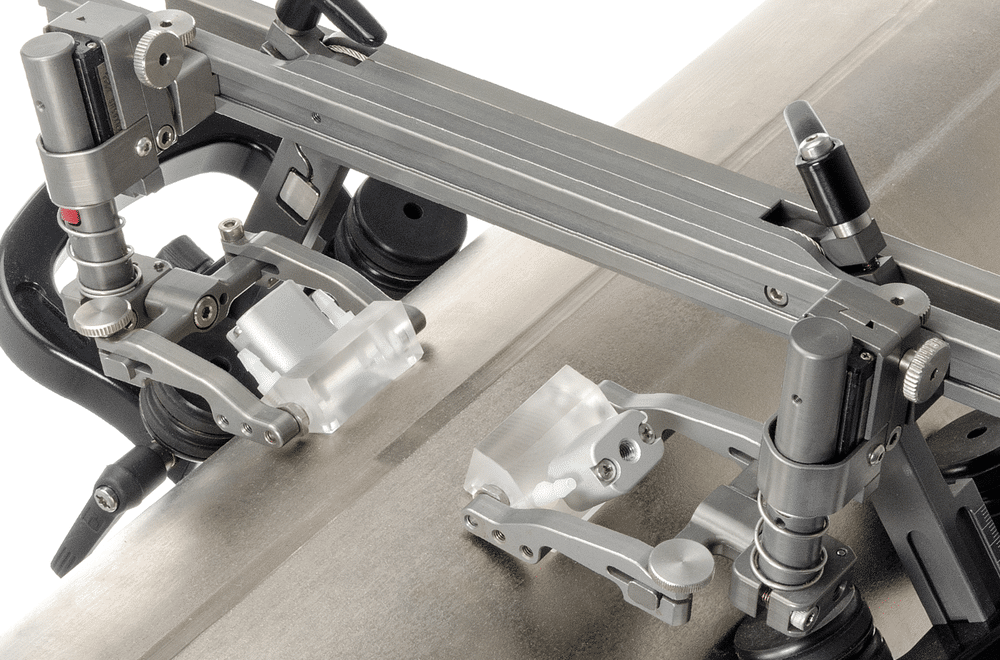
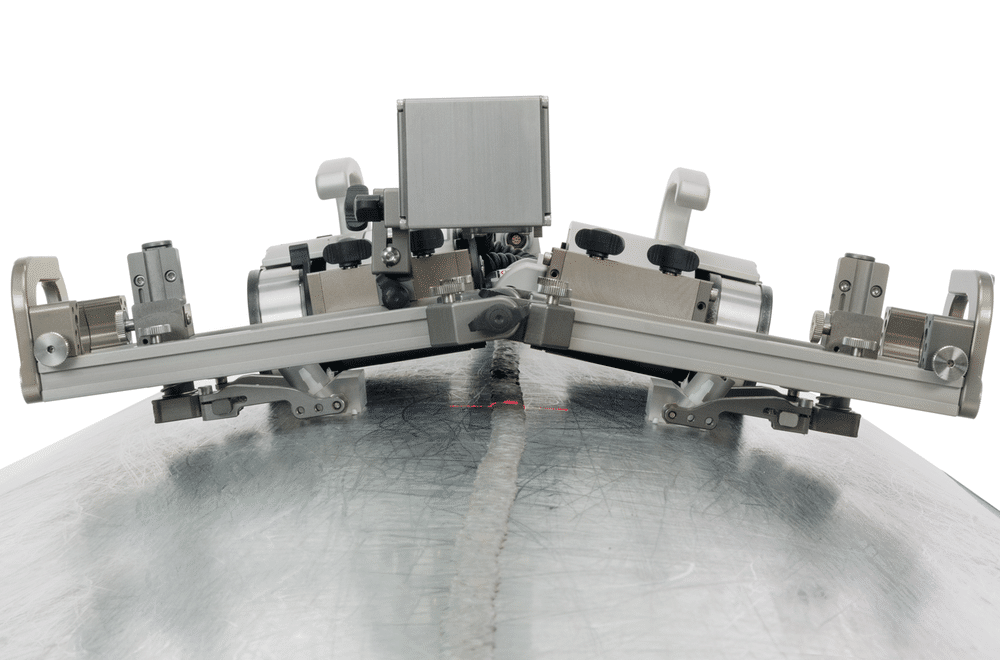
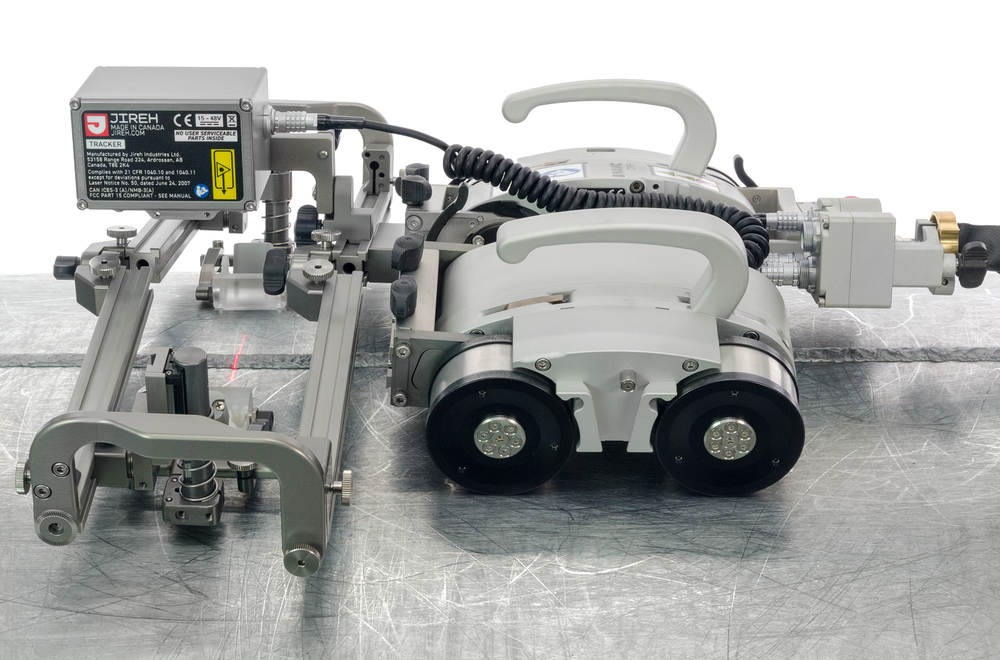
Weld Tracker
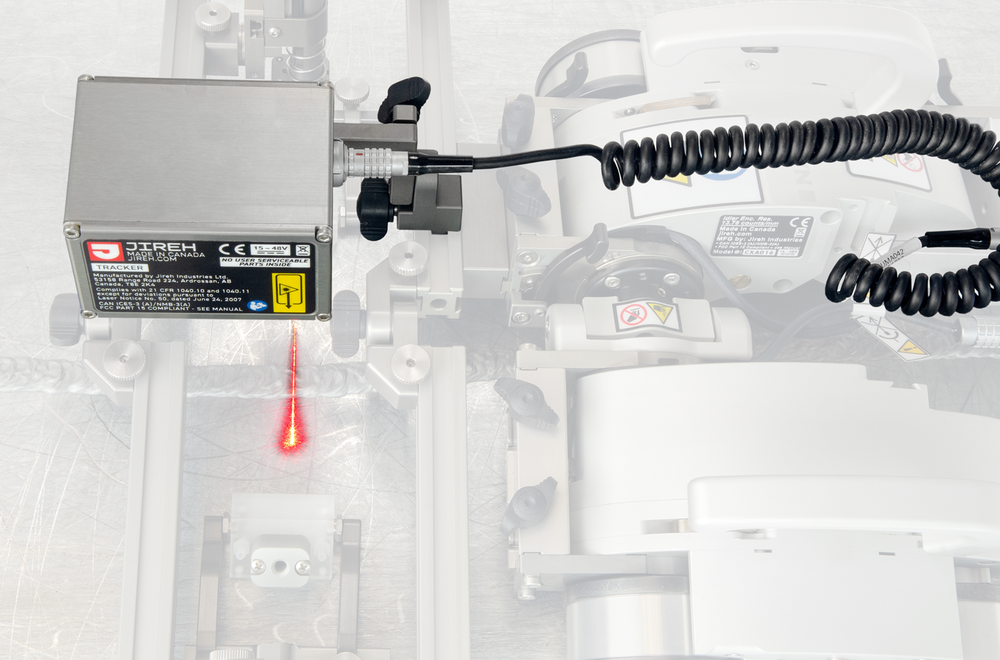
Kết hợp SteerROVER với bộ Weld Tracker giúp chuyển đổi thiết bị thành giải pháp quét tự động, được dẫn hướng bằng laser. Bộ Tracker thiết lập trên khung giá đỡ đầu dò, sử dụng định hướng laser tiên tiến để theo dõi các bề mặt cao (mũ mối hàn) trên vật liệu thép.
- Điều khiển đơn giản cho phép người dùng khởi động và dừng máy quét khi cần
- Thông tin theo dõi được hiển thị trên bộ điều khiển cầm tay
- Thiết lập nhanh chóng và dễ dàng.
- Góc mở: 20°

仕様
- 円周パイプ直径範囲: 2.75 インチ。 (70mm) 平まで
- 縦方向のパイプ直径範囲: 12 インチ。 (305mm) フラットまで
- 内部、円周パイプ範囲: 24 インチ。 (610mm)以上
- 最大スキャナー速度: 250 mm/s
- ラスターアームの最大速度: 762 mm/s
- スキャナー アイドラー エンコーダーの解像度: 13.78 ステップ/mm スキャナー モーター エンコーダーの解像度: 872.5 ステップ/mm ラスター アームの解像度: 240.2 ステップ/mm
注文情報
| 品番 | 商品番号 | 説明 |
| SteerROVER-Weld-5m | Q7500050 | SteerROVER™ スキャナーと溶接プローブ ホルダー ラック。 5 m (16 フィート) の長さのケーブル。 |
| SteerROVER-Weld-15m | Q7500051 | 溶接プローブ ホルダー ラックを備えた SteerROVER スキャナー。 15 m (49 フィート) の長さのケーブル。 |
| SteerROVER-Weld-30m | Q7500052 | 溶接プローブ ホルダー ラックを備えた SteerROVER スキャナー。 30m (98 フィート) の長さのケーブル。 |
| SteerROVER-Raster600-7.5m | Q7500053 | 長さ 600 mm (2 フィート) のラスター アームを備えた SteerROVER スキャナー。 7.5m (24.6 フィート) の長さのケーブル。 |
| SteerROVER-Raster600-15m | Q7500054 | 長さ 600 mm (2 フィート) のラスター アームを備えた SteerROVER スキャナー。 15m (49 フィート) の長さのケーブル。 |
| SteerROVER-Raster600-30m | Q7500055 | 長さ 600 mm (2 フィート) のラスター アームを備えた SteerROVER スキャナー。 30m (98 フィート) の長さのケーブル。 |
| SteerROVER-Raster900-7.5m | Q7500056 | 長さ 900 mm (3 フィート) のラスター アームを備えた SteerROVER スキャナー。 7.5m (24.6 フィート) の長さのケーブル。 |
| SteerROVER-Raster900-15m | Q7500057 | 長さ 900 mm (3 フィート) のラスター アームを備えた SteerROVER スキャナー。 15m (49 フィート) の長さのケーブル。 |
| SteerROVER-Raster900-30m | Q7500058 | 長さ 900 mm (3 フィート) のラスター アームを備えた SteerROVER スキャナー。 30 m (98 フィート) の長さのケーブル。 |
| MapROVER-A-Laser | Q7750081 | プローブ ホルダー ラックで使用するオプションのレーザー ガイド。 |
| SteerROVER-A-CameraMount | Q7201259 | オプションのカメラ マウント サポート。 |
| SteerROVER-A-Pivoting溶接ラック | Q7201258 | SteerROVER-Raster パッケージに溶接検査機能を追加するピボット プローブ ホルダー ラック。 |
| MapROVER-SP-VPH-PA | Q7750121 | フェーズドアレイプローブ用垂直プローブホルダー。 |
| MapROVER-SP-VPH-TOFD | Q7750126 | TOFDプローブ用の垂直プローブホルダー。 |
| MapROVER-A-D790-プローブホルダー | Q7750070 | D790-SM デュアル UT プローブ用の頑丈なプローブ ホルダーと取付具。 |
垂直トランスデューサーホルダー
垂直プローブ ホルダーには、オプションのピンと、オリンパス A12 および A32 プローブに十分な間隔の標準ドロップ アームが装備されています。このフィクスチャは、左右両方のトランスデューサに使用できます。