














A: Cả hai đều là quá trình xử lý số. Thu ảnh ma trận đầy đủ (FMC) là một chiến lược thu nhận dữ liệu. Trong chế độ FMC cơ bản, một phần tử tạo xung và tất cả các phần tử khác nhận tín hiệu phản xạ, tạo ra A-Scan sơ cấp cơ bản. Quá trình lặp lại cho đến khi từng phần tử trong đầu dò được kích hoạt, và mọi kết hợp có thể có giữa phát và thu được ghi nhận. Bản thân việc thu dữ liệu FMC cần phải được xử lý thêm để có thể trở nên hữu dụng, trong đó phương pháp xử lý ảnh lấy nét tổng thể (TFM) là thuật toán hay được sử dụng. TFM là một quá trình tái tạo hình ảnh sử dụng các A-Scan cơ bản thu được từ FMC. Thuật toán TFM xử lý dữ liệu dựa trên các biến số đầu vào chính, như chế độ lan truyền âm thanh và độ phân giải để đưa ra các dữ liệu có nghĩa và chia thành các chế độ xử lý khác nhau. Các chế độ hay tập sóng TFM biểu thị đường đi của sóng siêu âm từ biến tử phát đến vị trí pixel hình ảnh và trở lại các biến tử thu (bao gồm cả tín hiệu phản xạ, nhiễu xạ…), được xác định bởi các loại sóng (ngang hoặc dọc) cho mỗi đường truyền. Ví dụ, tập sóng TT-T là đường truyền sóng ngang phản xạ hai lần trước quay về biến tử nhận.
Dữ liệu FMC có thể được xử lý để đưa ra nhiều hình ảnh TFM khác nhau.
A: Vài chế độ (hay tập sóng) có phản hồi tốt hơn trên các khuyết tật dạng thẳng đứng. Khuyến cáo ban đầu là sử dụng TT-T ở chế độ self-tandem. Cần chú ý rằng, thông thường, một chế độ không thể cho phản hồi tốt trên toàn bộ chiều cao vách. Việc sử dụng thêm một vài tập hợp sóng nữa, ví dụ như TL-T, có thể giúp đưa ra hình ảnh tốt hơn ở những vị trí cho phản hồi kém từ chế độ đầu tiên (T-TT), trong khi các chế độ pulse-echo như T-T và TT-TT có thể sử dụng để phát hiện hiệu ứng góc và tín hiệu nhiễu xạ. Cách dễ nhất để đảm bảo có hình ảnh tốt và khả năng phát hiện cao là sử dụng tính năng bản đồ màu tín hiệu phản hồi – Acoustic Influence Map (AIM) trên thiết bị OmniScan® X3, kết hợp với các thí nghiệm thực tế để phân loại và hiểu rõ ưu nhược điểm của từng chế độ sóng. Cần lưu ý rằng khi sử dụng chế độ self-tandem sẽ gặp một số hạn chế tương tự như sử dụng với siêu âm thường, đó là chiều dày hay vận tốc của sóng siêu âm cần đảm bảo rất chính xác để có kết quả đúng. (Xem thêm “Sự khác nhau giữa chế độ sóng pulse-echo và self-tandem?” để có thêm thông tin.)
A: Trừ một vài ứng dụng rất cụ thể có chiều cao cột nước giữ cố định, câu trả lời là Không thể. Do vận tốc sóng âm khác nhau giữa nước và vật liệu cần kiểm tra, chiều cao cột nước chỉ cần có một sự thay đổi nhỏ sẽ gây ra sự sai lệch lớn khi tính toán đường truyền âm trong vật liệu. Ví dụ, chiều cao cột nước thay đổi 0.5 mm tương ứng với sự thay đổi 2 mm trong thép carbon, qua đó ảnh hưởng đến khả năng hội tụ của TFM. Tuy nhiên, mong bạn tiếp tục theo dõi vấn đề này do Olympus cũng đang có kế hoạch phát triển các giải pháp mới liên quan.
A: Tại thời điểm này, bạn chưa thế truy suất các dữ liệu FMC thô. Tuy nhiên, mong bạn tiếp tục theo dõi vấn đề này do Olympus cũng đang có kế hoạch phát triển các giải pháp mới liên quan. Trên các phiên bản firmware mới nhất, Olympus cũng đã cập nhật tính năng hiển thị A-Scan (Echodynamic) cho các tác vụ cần độ chính xác với biên độ phản hồi như kiểm tra mối hàn
A: Ưu điểm lớn nhất là cải thiện đáng kể độ rõ ràng của ảnh TFM, có được qua phương pháp xử lý các rìa sóng phát sinh trong quá trình tái tạo hình ảnh TFM. Khả năng xử lý đường bao thời gian thực cũng làm giảm các tín hiệu sai lệch. Một lợi thế rõ ràng của tính năng đường bao trên OmniScan X3 khi cần phát hiện các khuyết tật nhỏ, như các ăn mòn do xâm thực Hydro ở nhiệt độ cao (HTHA). Các hình ảnh bên dưới so sánh tín hiệu từ HTHA với đường bao tắt và bật.
A: OmniScan X3 có khả năng chia việc thu nhận FMC thành 2 phần, phát 1 biến tử và thu sử dụng 32 biến tử đầu tiên, sau đó lặp là và tiếp thục thu sử dụng vùng biến tử tiếp theo (33–64) trong chu trình rất nhanh. Kết quả là có thể tạo ra tín hiệu hình ảnh từ 64-element TFM mà vẫn giữ được giá thành của thiết bị không quá cao.
A: Ở thời điểm này, AIM (Acoustic Influence Map) là tính năng độc quyền trên TFM. Tuy nhiên, mong bạn tiếp tục theo dõi vấn đề này do Olympus cũng đang có kế hoạch phát triển các giải pháp mới liên quan.
A: Trong khi tăng độ phân giải (độ phân giải lưới đặt ở mức cao) có thể cải thiện chất lượng ảnh TFM, gánh nặng xử lý sẽ làm giảm tốc độ thu nhận dữ liệu. Do vậy, người sử dụng cần chọn “giá trị tối ưu” giữa khả năng phát hiện và đánh giá tín hiệu mà không lảm giảm năng suất. OmniScan X3 có tích hợp các thông số hiển thị rất hữu ích cho việc thay đổi độ phân giải lưới tùy theo tần số trung tâm của đầu dò cũng như bước sóng trong vật liệu, cả cho sóng cắt (T-wave) và sóng dọc (L-wave). Một giá trị hiển thị khác về giá trị Amplitude fidelity theo chế độ sóng âm và độ phân giải lưới cũng được đưa ra tự động. Giá trị hiển thị và tính toán tự động này rất hữu ích do các tiêu chuẩn mới về FMC/TFM thường yêu cầu người vận hành tính toán Amplitude fidelity phải đạt tới 2db hoặc nhỏ hơn dựa trên độ phân giải lưới đã chọn. Với việc tính toán tự động, thiết bị OmniScan X3 loại bỏ các rắc rối khi cần làm thực nghiệm để tính toán giá trị amplitude fidelity.
A: Sự khác nhau giữa hai phương án lên Scan plan là đáng kể do cách xây dựng hình ảnh TFM. Ở chế độ pulse-echo, hình ảnh TFM được dựng sử dụng cùng một dạng sóng âm (ví dụ, T-T, TT-TT, L-L…) dù dùng tia trực tiếp hay phản xạ mặt đáy. Các chế độ lan truyền sóng này, hay tập sóng, tương tự như trong PAUT. Trong chế độ pulse-echo TFM, thay đổi về chiều dày vật kiểm tra chỉ làm thay đổi vị trí của tín hiệu mặt đáy hay các khuyết tật kết nối với ID. Ở chế độ Self-tandem TFM lại khác, do đường truyền âm từ biến tử phát và tới biến tử thu là khác nhau ( TT-T, TL-T) và bao gồm phản hồi từ back wall, tiếp theo là các tín hiệu phản hồi từ bất liên tục khác (chỉ thị, mặt thẳng đứng) trước khi quay trở lại đầu dò. Ngược với chế độ pulse-echo TFM, self-tandem rất nhạy với các thay đổi dù là nhỏ của chiều dày vật kiểm tra. Thay đổi về chiều dày khoảng 5% có thể làm cho tín hiệu của self-tandem TFM “không hội tụ”, do vậy cần rất chú ý khi đặt chiều dày vật kiểm tra.
A: Tất nhiên! Giống như với PAUT, bạn có thể sử dụng đầu dò có hoặc không có nêm trong kiểm tra TFM.
A: Tín hiệu A-scan hiển thị cạnh TFM “end view” được lấy từ tín hiệu hình ảnh TFM image và không phải lấy trực tiếp từ FMC. TFM A-scan biểu diễn biên độ của một điểm ảnh trong ma trận. Do vậy A-scan trong TFM được gọi là A-scan nhân tạo thay vì A-scan gốc như PAUT.
A: Whether the total focusing method is better than PAUT is a matter of application and preference. Are apples better than oranges? Anyone who prefers one over the other can argue that apples are better suited for apple pie or oranges make better orange juice. Here is a list of pros and cons for each technique, so you can decide which one you prefer for your application:
- Image: Both PAUT and TFM can display an excellent image—depending on the application, probe selection, and parameters selected. The TFM can be set to display an image that is closer to the actual geometry of the part than PAUT, which is very handy when giving demonstrations and explanations to non-NDT people. TFM also has the advantage of being focused everywhere—provided that the settings enable operation in the near field. Past the near-field region, focalization parameters have little to no effect on the measurement, both in PAUT and TFM. Generally speaking, many will agree that TFM can produce more appealing images, which is the driving force behind this technology.
- Focus: TFM is engineered to be focused everywhere; however, one fact that is often overlooked, is that this only works in the near-field region. TFM uses ultrasound, so the same laws of physics apply to both PAUT and TFM. In the PAUT focused region, the TFM and PAUT performance should be quite similar. PAUT can operated unfocused (for screening purposes) or focused (for accurate sizing).
- Detection: Both TFM and PAUT can provide an equivalent or better detection performance than the other, depending on the application. The ability of TFM to focus everywhere can help resolve smaller indications, such as inclusions and porosities, without the need to adjust the focus in relation to the detected flaw’s position. However, the TFM’s sensitivity drops significantly in areas outside its main acoustic influence zone. Additionally, different TFM modes exhibit very different sensitivity patterns. Finally, TFM is also very sensitive to defect orientation—since it is, after all, an ultrasound technique. Operating TFM inspection without knowing the effect and limit of influence of each of the above variables, can lead to a poor detection performance. The best way to ensure good detection is to generate a simulated sensitivity map (such as the AIM feature of the OmniScan X3 flaw detector) and to support the simulation results with prove-up testing. Alternatively, PAUT detection capabilities are well known, since the technique has been in use in NDT for decades. PAUT is recognized as offering excellent detection and sizing of various type cracks and lack of fusion, but is accepted as less effective on smaller indications, such as isolated porosities. The above statement is “generally true,” but only because most PAUT inspections are initially performed unfocused (for screening purposes). When using PAUT in focused mode, combined with an appropriate, good-quality probe and wedge, can produce results that are as good as TFM. However, this only applies to the area where the beam is focused.
- Near-surface resolution and geometrical echoes: TFM performs generally better than pulse-echo PAUT when it comes to reducing near-surface echoes, though using a pitch-catch PAUT configuration, such as with DLA/DMA probes, also helps eliminate this issue. Another aspect where TFM excels is the reduction of geometrical echoes. When inspecting in the near field, TFM is normally focused everywhere, which contributes to reducing the size of all echoes. In PAUT, it is possible to reduce echoes caused by the specimen geometry by using an appropriate selection of side/top/merged views during the analysis process.
Signal-to-noise ratio (SNR): Generally speaking, PAUT exhibits a better signal-to-noise ratio than TFM, simply because the wider aperture in PAUT produces more ultrasound energy than the individual pulsers used in TFM. However, special envelope processing in TFM can compensate for the drop in SNR. Again, ensuring that detection is properly achieved through prove-up is the key to making sure that the signal-to-noise ratio is not a concern for both TFM and PAUT. - Speed: As FMC acquisition typically pulses each element successively, and PAUT uses a limited number of beam sets (focal laws), the PAUT is generally faster. Additionally, the TFM requires real-time intense processing, which slows down the acquisition further—something that PAUT instrumentation does not require. Generally speaking, PAUT can lead to much faster acquisitions than TFM.
- Scan plan and simulators: PAUT uses ray-tracing modeling to help you build a scan plan. TFM, which cannot use simple ray tracing, requires a simulator to show its coverage. The OmniScan X3 flaw detector is equipped with simulation tool called AIM, which stands for Acoustic Influence Map. It shows you the coverage that is offered by each wave set to help you select which FMC data to save. Both TFM and PAUT ensure proper coverage in their own ways, so it’s important to learn about each to obtain reliable results for that method (see “Training” below).
Training: Both TFM and PAUT require proper training to be used effectively. The scope and time recommended for training for each technique is nearly equal. Misconceptions such as “anyone can setup a box with TFM” or “you can beam just every angle with PAUT” contribute to people misunderstanding these technologies. This can lead to false calls, and the only way to prevent this is proper training. - Historical presence and proven: PAUT has been used successfully in NDT for more than two decades and has established used cases, capabilities, and limitations. Alternatively, TFM is an emerging technology offering a wide range of possibilities that the industry has yet to fully exploit.
Adjusting on the spot: Both TFM and PAUT enable uses to make on-the-spot setting changes. - Calibration: Both TFM and PAUT require proper sensitivity calibration to ensure that defects will be detected across the entire targeted range (or zone).
Giải thích kỹ thuật liên quan đến chỉ thị giả trong TFM
(Thông tin từ University of Ultrasonic/Shane Walton)
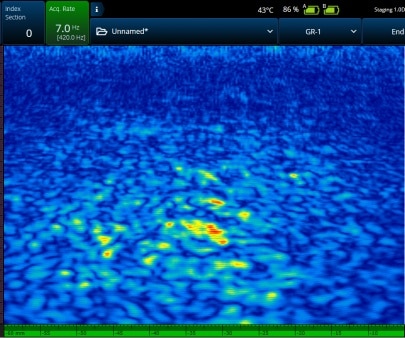
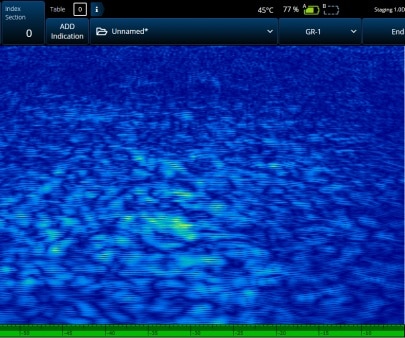
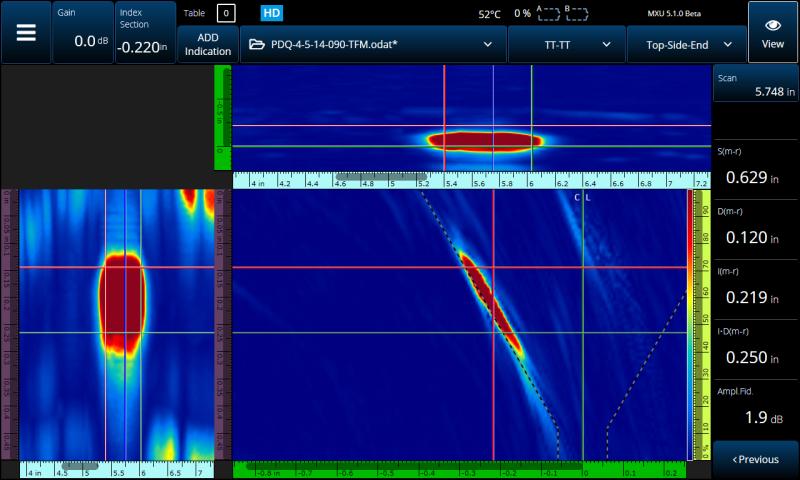
Chúng ta sẽ lấy một ví dụ cụ thể với mối hàn thép carbon dày 12.5mm (0.500″) với cấu hình mối hàn dạng Single V, góc vát mép 37.5 độ dài 450 mm (18″). Đầu dò/nêm sử dụng là 5L32-A32-N55S với Index offset đặt ở 12mm (0.5″) ngay sát chân mối hàn. Thiết bị OmniScan X3 được thiết lập đê quét TFM “T-T” hay 2T. Khi đó chúng ta thấy một chỉ thị ở khoảng 150mm (5.5″), ở gần vị trí của center line, hình dạng khá tròn và rõ, đây có thể là một chỉ thị cho ngậm xỉ?
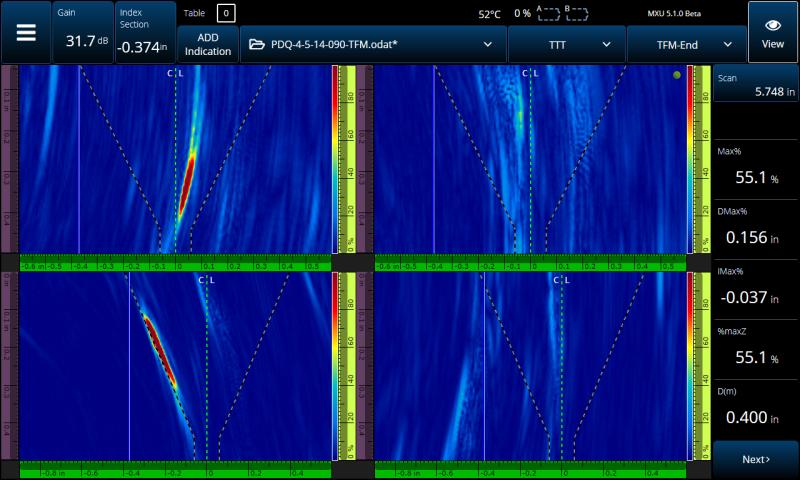
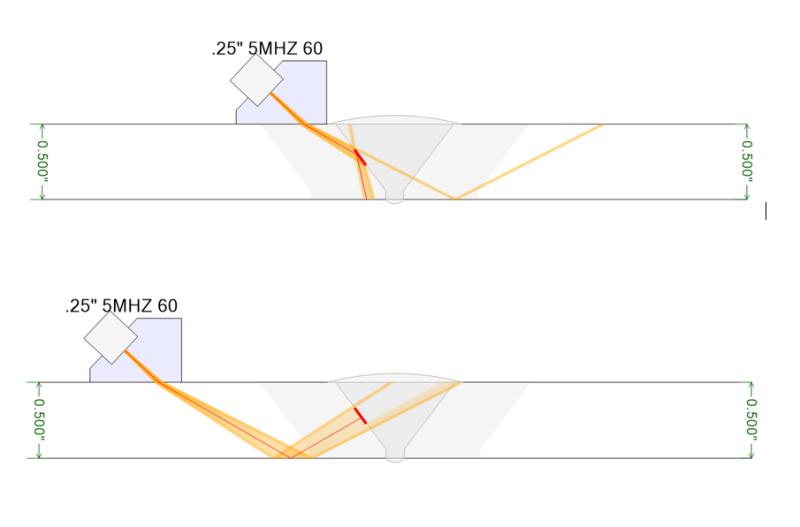
Do vậy, khi kiểm tra TFM, cần lưu ý tránh việc phụ thuộc duy nhất vào 1 chế độ kiểm tra và phải có các biện pháp khác để xác nhận lại.
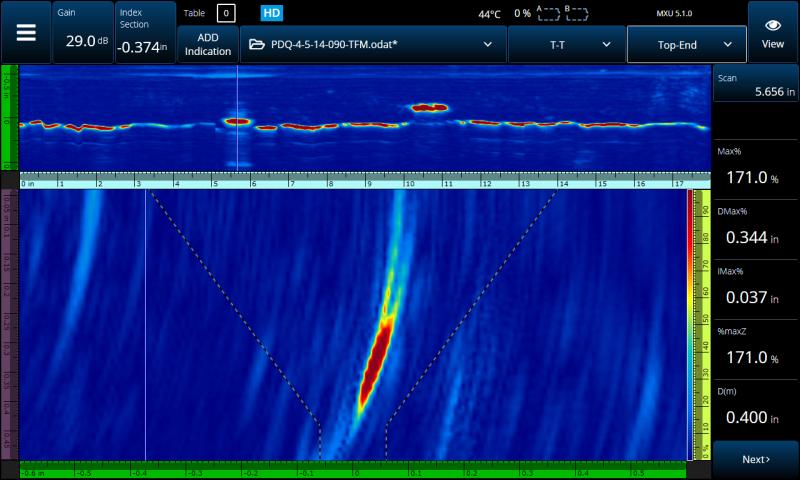
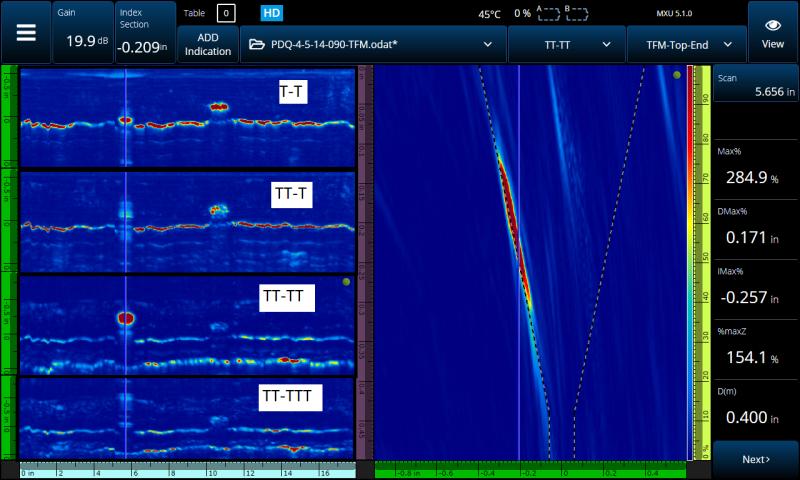
Hình ảnh bên dưới là chỉ thị LOF, được dựng chính xác về biên dạng và kích thước. TT-TT (tương tự như kiểm tra siêu âm chân thứ 2) phù hợp cho việc này. T-T cũng sẽ cho thấy kết quả tốt nếu để ở chế độ T-T mở rộng.
Lựa chọn cẩn thận các tham số TFM (Chế độ lan truyền sóng, Kích thước vùng, vị trí, độ phân giải) và các tham số khác như loại đầu dò / nêm / index offset (tương tự PAUT) trong quá trình lập kế hoạch quét sẽ giúp phát hiện, vẽ chính xác giúp xác định đặc tính và kích thước đáng tin cậy hơn.
Nếu chỉ đơn giản là sử dụng đầu dò và nêm và “kiểm tra ở chế độ TFM”, có thể bạn sẽ gặp rắc rối. Các giới hạn về vật lý của sóng âm vẫn được áp dụng, giống như với Phased Array hay siêu âm thông thường.
Cuối cùng, mời các bạn tham khảo bản Sketch cho mẫu đã quét ở hình ảnh đính kèm bên dưới.

핑백: Ba cải tiến trên FMC/TFM của thiết bị OmniScan X3 – VISCO NDT